Les robots s’intègrent de plus en plus dans la vie quotidienne, et une équipe de chercheurs de l’Université de Zhejiang, en Chine, a récemment réalisé une avancée notable. Leur dernière création, un actionneur souple inspiré du poignet capable de torsion bidirectionnelle, ouvre de nouvelles perspectives pour la robotique souple.
Un design innovant inspiré du poignet humain
Le design novateur de cet actionneur, décrit en détail dans la revue Cyborg Bionic Systems, s’inspire de la capacité du poignet humain à effectuer des mouvements complexes. Contrairement aux mécanismes robotiques traditionnels qui reposent sur des composants rigides, cet actionneur souple utilise un système hybride magnéto-pneumatique combiné à une structure origami de Kresling.
Grâce à cette conception, l’actionneur peut atteindre un angle de rotation impressionnant de 239,5 degrés, surpassant largement les modèles existants. Yan Xu, Kaiwen Ju et Chao Zhang, les chercheurs à l’origine de ce développement, ont exploité les complexités géométriques de l’origami pour créer un actionneur capable de réaliser ces grands angles de rotation de manière compacte et efficace.
Technologie hybride magnéto-pneumatique
Le cœur de la technologie de l’actionneur réside dans sa méthode de conduite hybride magnéto-pneumatique unique. Ce système combine habilement les forces magnétiques et pneumatiques pour contrôler le mouvement de l’actionneur, lui permettant de maintenir trois états stables et de gérer efficacement la déformation en torsion bidirectionnelle.
Les applications de cette technologie ne se limitent pas à la robotique. Elles s’étendent à divers domaines nécessitant une manipulation délicate et précise, tels que les dispositifs biomédicaux et les processus de fabrication avancés.
Implications pratiques et validations expérimentales
Les implications pratiques de cette technologie sont vastes. Par exemple, dans les applications robotiques souples, telles que les dispositifs portables ou les technologies d’assistance, la flexibilité et l’amplitude de mouvement de l’actionneur pourraient améliorer considérablement l’interaction et la fonctionnalité des utilisateurs.
Des validations expérimentales menées par l’équipe ont montré des résultats prometteurs, démontrant l’efficacité et la résilience de l’actionneur. Celui-ci a subi des tests rigoureux, y compris des analyses cinématiques et des expériences de caractéristiques quasi-statiques, pour garantir la stabilité et la fiabilité de ses performances dans diverses conditions opérationnelles.
Personnalisation et perspectives futures
Un des aspects les plus remarquables de ce développement est la possibilité de personnalisation de l’actionneur. Selon l’application spécifique, l’actionneur peut être conçu avec différents paramètres géométriques pour répondre à des exigences particulières, en faisant une solution hautement adaptable pour de nombreux systèmes robotiques.
À l’avenir, l’équipe de recherche prévoit d’affiner cette technologie en améliorant ses capacités de charge et en optimisant son efficacité énergétique. De telles améliorations pourraient ouvrir la voie à des applications plus larges, potentiellement conduisant à des systèmes robotiques plus sophistiqués et autonomes.
Cette réalisation marque une étape importante dans le domaine de la robotique, offrant un aperçu de la manière dont les machines pourraient imiter de plus près les mouvements et les interactions humaines. À mesure que cette technologie évolue, elle pourrait redéfinir les limites de ce qui est possible en matière de robotique et d’automatisation.
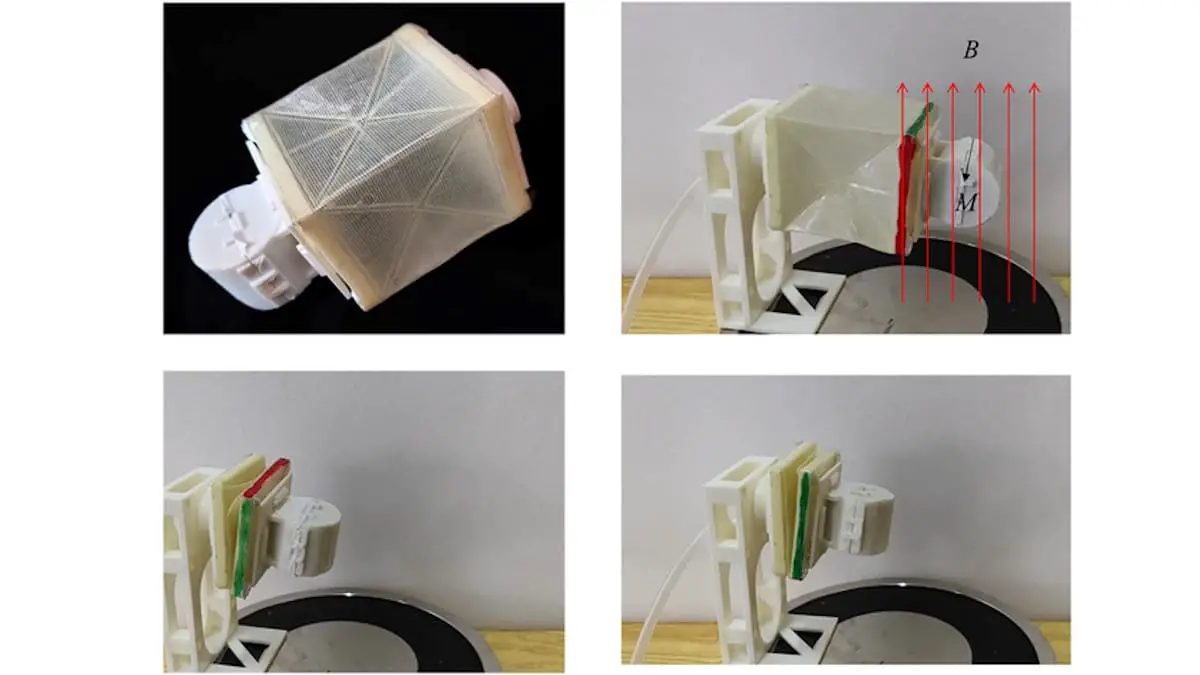
Légende illustration : Vérification expérimentale. (A) montre un modèle de démonstration de l’actionneur souple. (B) montre la plateforme expérimentale permettant de vérifier les performances de l’actionneur souple. L’extrémité gauche de l’actionneur est fixe et l’extrémité droite est libre. Sous le contrôle du système de commande hybride magnéto-pneumatique, l’actionneur souple réalise une torsion bidirectionnelle. (C) montre l’actionneur souple entièrement plié après une déformation par torsion dans le sens des aiguilles d’une montre. (D) montre l’actionneur souple entièrement plié après une déformation de torsion dans le sens inverse des aiguilles d’une montre.
Article : « A Wrist-Inspired Magneto-Pneumatic Hybrid-Driven Soft Actuator with Bidirectional Torsion » – DOI: 10.34133/cbsystems.0111