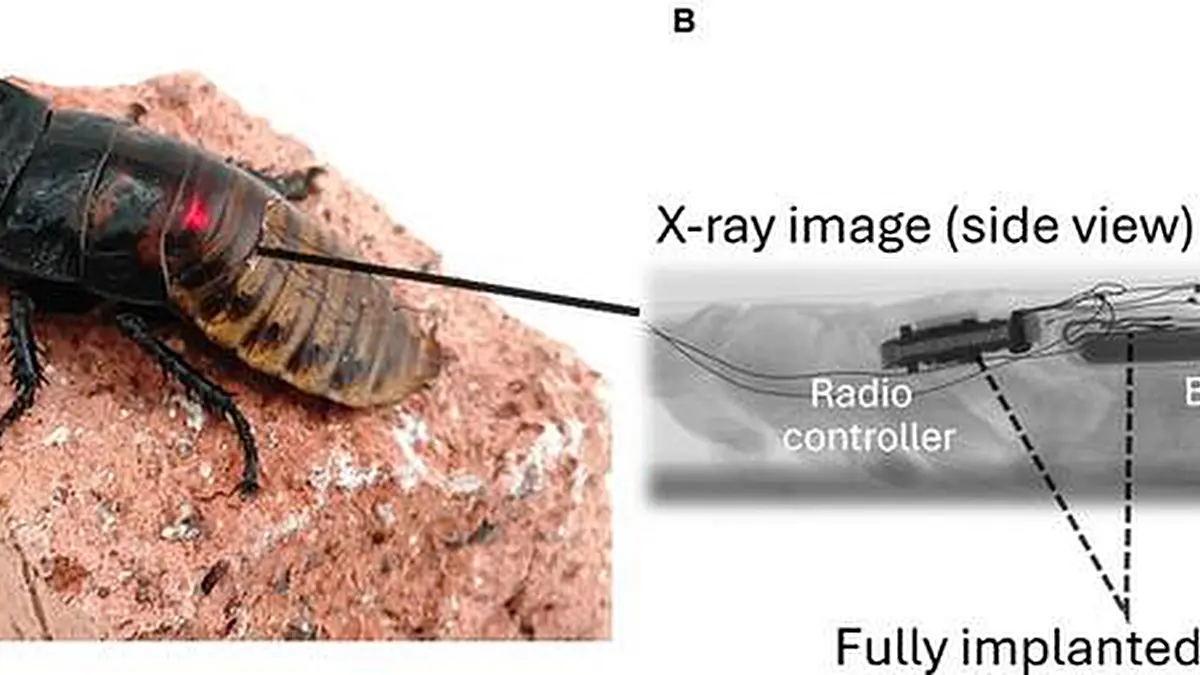
« Nous avons conçu un contrôleur sans fil de seulement 10 mm de large, 10 mm de long et 3 mm de haut – assez petit pour être implanté entièrement dans l’abdomen du cafard », explique le professeur Sato. La carte ne pèse que 0,5 g et fonctionne avec une batterie lithium-polymère de 9 mAh, également implantée. Elle utilise une communication sub‑1 GHz et émet des impulsions électriques biphasiques pour stimuler les antennes de l’insecte (pour tourner) et les cerques (pour la marche avant). Un revêtement en élastomère de silicone isole les composants électroniques, les rendant biocompatibles.
L’équipe a construit une piste avec un obturateur mobile créant un espace vertical de 8 mm – plus petit que la hauteur du corps du cafard. Les cafards intacts baissaient naturellement la tête, soulevaient l’obturateur et passaient en force, réussissant dans 95 % des cas. Lorsque les mêmes insectes portaient le contrôleur en sac à dos (collé sur le thorax), le sac à dos heurtait l’obturateur, forçant l’animal à le soulever beaucoup plus haut ; le taux de réussite chutait à 15 %, et le temps de traversée doublait. En revanche frappante, les cafards avec le contrôleur entièrement implanté se comportaient presque comme des cafards intacts : 90 % de réussite et des temps de traversée même légèrement plus rapides (8,1 s contre 9,6 s).
« L’implant ne modifie pas la rondeur du corps ni la démarche naturelle en trépied », déclare le professeur Sato. « L’insecte conserve sa forme profilée, ce qui réduit la résistance mécanique et facilite la rotation du corps lorsqu’il se faufile dans des espaces étroits. »
Pour démontrer la contrôlabilité, l’équipe a mis en œuvre un algorithme de navigation automatique. Lorsque la vitesse de déplacement du cyborg tombait en dessous de 5 mm/s, il recevait un stimulus de marche avant au niveau des cerques ; si sa direction déviait de plus de 45° par rapport à la cible, il recevait une stimulation des antennes pour faire demi-tour. Sur 66 essais, 90,9 % ont atteint la cible virtuelle avec succès. La réponse moyenne de rotation était de 16,7°/s pour les stimuli à gauche et de 26,3°/s pour les stimuli à droite, et la stimulation avant relançait la marche de manière fiable.
Le véritable avantage de l’implantation a ensuite été testé dans un couloir obstrué en trois étapes : des briques empilées, des câbles disposés aléatoirement et une fente étroite. Les cyborgs avec le sac à dos ont réussi seulement 40 % (briques), 50 % (câbles) et 0 % (fente). Ceux avec l’implant ont réussi respectivement 95 %, 89 % et 63 %, et ont traversé chaque obstacle significativement plus vite.
« Le sac à dos se coinçait souvent dans les briques ou les câbles, forçant l’insecte à changer de route ou à abandonner », note le professeur Sato. « L’implant permet au cafard d’utiliser tout son répertoire comportemental – rouler, se déplacer latéralement, pousser – comme un insecte normal. »
Pour rendre la procédure plus fiable, l’équipe a également développé un système d’implantation basé sur un bras robotique. Une pince parallèle avec un embout spécial perce la membrane intersegmentaire et pousse le contrôleur à l’intérieur ; le processus complet prend 25 secondes et atteint 100 % de succès chez les cafards de taille moyenne. De plus, les chercheurs ont découvert que la stimulation simultanée des deux antennes pendant 1,2 seconde induit de manière fiable une marche arrière – une manœuvre d’évasion utile lorsque l’insecte rencontre une impasse.
Le taux de survie après implantation est passé de 43 % à 7 jours à 86 % après avoir affiné la technique chirurgicale (en utilisant une spatule pour détacher les tissus internes avant l’insertion). Avec une fenêtre opérationnelle pratique de plusieurs jours, les cafards cyborgs sont déjà adaptés à des missions telles que l’inspection structurelle post-catastrophe ou la surveillance de pipelines. Les travaux futurs se concentreront sur des composants électroniques flexibles encore plus petits, des piles bioélectrochimiques ou des films solaires pour réduire davantage l’invasivité, et l’intégration de capteurs (IR, caméra, IMU) pour l’exécution autonome de tâches.
« Notre étude montre que la manière dont vous fixez l’électronique n’est pas un détail mineur – elle détermine directement si le cyborg peut réellement naviguer sur le terrain qu’il est censé explorer », conclut le professeur Sato. « L’implantation complète préserve l’intelligence corporelle évoluée de l’insecte, rendant les insectes cyborgs véritablement capables d’opérer dans les environnements encombrés et imprévisibles où ils sont le plus nécessaires. »
Les auteurs de l’article incluent Kazuki Kai, Le Duc Long, Qifeng Lin et Hirotaka Sato. L’article « Un contrôleur radio miniature entièrement implanté améliore la mobilité des insectes cyborgs sur des terrains difficiles » a été publié dans la revue Cyborg and Bionic Systems le 25 mai 2026, au DOI : 10.34133/cbsystems.0589.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.