Michael Miller
Des chercheurs de l’Université de Cincinnati développent un drone à ailes battantes capable de localiser et de planer autour d’une lumière mobile, tel un papillon de nuit attiré par une flamme. Le professeur adjoint Sameh Eisa de l’UC et ses étudiants ont créé un drone inspiré des papillons de nuit qui navigue sans IA grâce à un système de rétroaction par recherche d’extremum. Les chercheurs affirment que ce système est extrêmement efficace et peut être miniaturisé à des proportions infimes.
Le professeur adjoint Sameh Eisa du Collège d’ingénierie et des sciences appliquées de l’UC et ses étudiants en ingénierie aérospatiale s’intéressent à ces drones inhabituels en raison de leur vol hautement efficace, qui peut être réduit pour une utilisation dans la surveillance discrète.
Les papillons de nuit ont l’incroyable capacité de planer sur place ou même de voler en arrière. Ils effectuent automatiquement des ajustements fins pour compenser le vent ou les obstacles afin de rester stationnaires ou de suivre un objet en mouvement. De même, le drone de type papillon de nuit d’Eisa effectue des ajustements fins pour maintenir une attitude et une distance souhaitées par rapport à une lumière, même lorsque celle-ci se déplace.
« La raison pour laquelle nous sommes intéressés est la taille. C’est une conception plus optimale. Ces petits robots devraient voler comme un papillon de nuit », a-t-il déclaré.
Dans son laboratoire de modélisation, de dynamique et de contrôle, Sameh Eisa explore l’ingénierie inspirée des animaux. Auparavant, il a examiné des drones capables d’exploiter la puissance du vol dynamique pour parcourir de vastes distances plus efficacement, un peu comme un albatros.
Pour son dernier projet publié dans la revue Physical Review E, Sameh Eisa et le doctorant Ahmed Elgohary ont émis l’hypothèse que les insectes en vol stationnaire sont capables de voler avec autant d’adresse parce qu’ils utilisent l’équivalent de systèmes de rétroaction par recherche d’extremum. Ces systèmes permettent la navigation des drones en temps réel sans calculs complexes, équipement de positionnement global ou intelligence artificielle, en effectuant simplement des ajustements constants des entrées de contrôle, telles que le nombre de battements par seconde.
Les drones à ailes battantes contrôlent le roulis, le tangage et le lacet en battant des ailes indépendamment. Mais ce battement indépendant est trop rapide pour être observé à l’œil nu. Au lieu de cela, les ailes ressemblent au flou des ailes d’un colibri.
« Nos simulations montrent que le contrôle par recherche d’extremum peut naturellement reproduire le comportement de vol stationnaire stable observé chez les insectes — sans IA ni modèles complexes », a indiqué Ahmed Elgohary, auteur principal de l’étude. « C’est un principe simple de rétroaction, sans modèle et en temps réel, qui pourrait expliquer comment ces petites créatures atteignent une telle agilité avec des capacités cérébrales très limitées. »
Le drone mesure simultanément la performance de la fonction qu’il est programmé pour optimiser, comme trouver une source lumineuse, pour corriger sa trajectoire dans une boucle de rétroaction constante qui permet un vol remarquablement cohérent et stable.
À quel point stable ? Le drone a pu reproduire le balancement subtil mais unique d’avant en arrière de chacun des insectes en vol stationnaire qu’il était conçu pour imiter : papillons de nuit, bourdons, libellules, syrphes, tipules ainsi que colibris.
« Les papillons de nuit donnent l’impression que c’est facile », a ajouté Sameh Eisa. « La raison pour laquelle nous utilisons des techniques de recherche d’extremum est qu’elles semblent biologiquement plausibles. »
Les insectes en vol stationnaire comme le papillon colibri, amateur de nectar, déplacent leurs ailes dans un mouvement unique en forme de huit qui leur permet d’obtenir de la portance à la fois lors de la descente et de la remontée de leurs ailes. Les ailes flexibles se déforment à chaque battement pour maximiser la portance et la maniabilité.

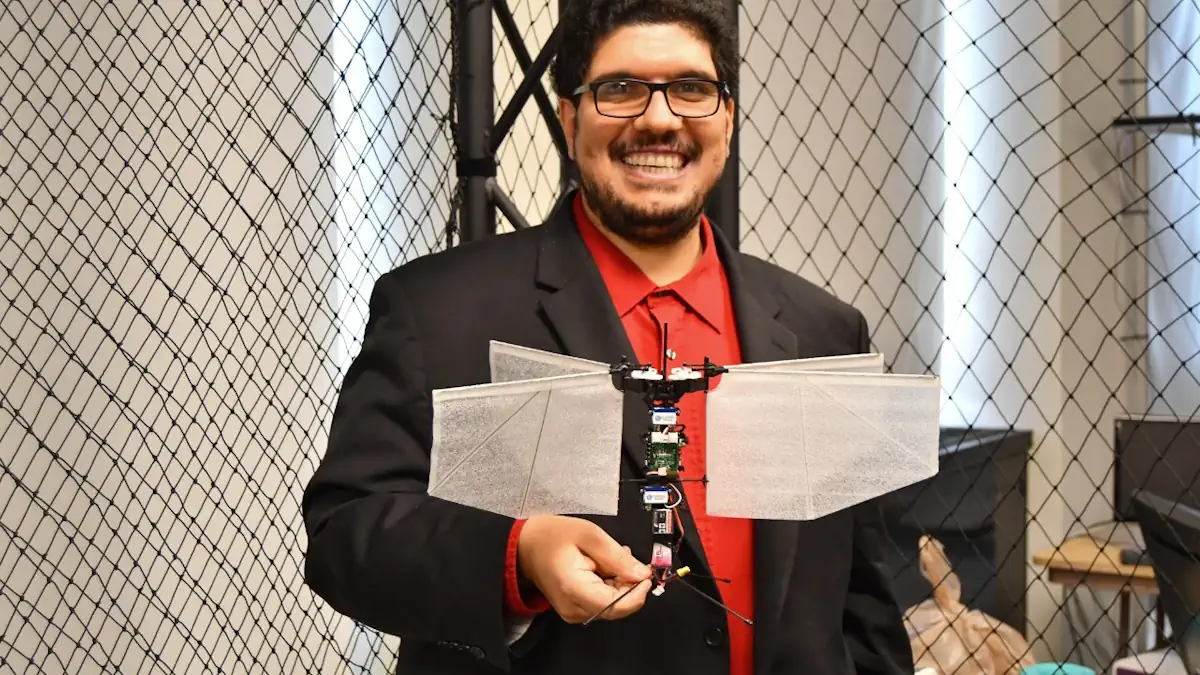
Ahmed Elgohary et l’étudiant diplômé de l’UC Rohan Palanikumar ont utilisé une télécommande pour démontrer comment le drone à ailes battantes vole dans le laboratoire de vol d’Eisa, qui est entouré d’un filet souple pour protéger à la fois les drones et les personnes des collisions accidentelles. Le drone a quatre « ailes » faites de fil et de tissu.
Contrôler manuellement le drone sensible est beaucoup plus difficile et moins fiable que d’utiliser son propre système de recherche d’extremum, a affirmé Ahmed Elgohary. Mais une fois activé, le drone à ailes battantes s’est élevé dans les airs et a plané sur place, bien qu’un peu instable. Cette instabilité est intentionnelle et fournit les perturbations dont le système a besoin pour évaluer les changements de performance afin qu’il puisse constamment corriger sa trajectoire pour optimiser son vol.
Sameh Eisa a également précisé que la recherche est intéressante non seulement pour ce qu’elle pourrait signifier pour les nouveaux véhicules aériens sans pilote autonomes, mais aussi pour la façon dont ces minuscules insectes gèrent leurs acrobaties aériennes miraculeuses avec des cerveaux de la taille d’un grain de pollen.
« Cela pourrait changer beaucoup de choses en biophysique. S’il est vrai que les insectes en vol stationnaire comme les papillons de nuit utilisent l’équivalent de notre rétroaction par recherche d’extremum, cela a probablement évolué chez d’autres créatures également », a-t-il conclu.
Article : « Hovering flight in flapping insects and hummingbirds: A natural real-time and stable extremum-seeking feedback system » (Le vol stationnaire chez les insectes battants et les colibris : Un système de rétroaction naturel, en temps réel et stable par recherche d’extremum) – DOI : 10.1103/4dm4-kc4g
Source : Cincinnati U.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.