Les robots sous-marins téléopérés sont devenus des outils indispensables pour l’exploration et la surveillance des fonds marins. Leur efficacité énergétique et leur discrétion sonore restent encore des défis majeurs à relever. Une équipe d’étudiants américains a développé un nouveau système de contrôle de la flottabilité basé sur des piles à combustible à électrolyse de l’eau.
Un robot sous-marin innovant basé sur les piles à combustible
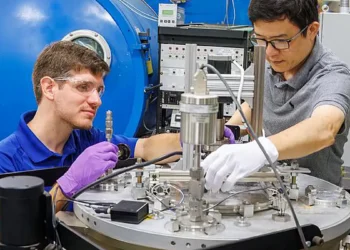
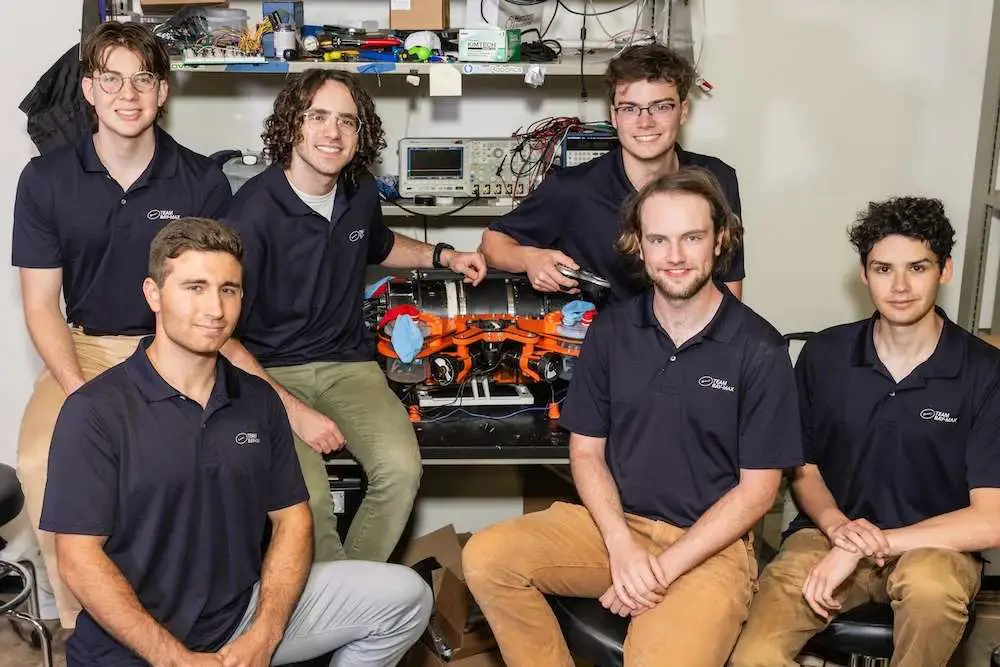
L’équipe Bay-Max, composée de six étudiants en ingénierie de l’Université Rice, a conçu et construit un robot sous-marin téléopéré au sein de l’Oshman Engineering Design Kitchen dans le cadre de leur projet de fin d’études. Ce robot, qui sert de preuve de concept, utilise des piles à combustible réversibles à hydrogène pour contrôler sa flottabilité de manière plus efficace sur le plan énergétique que les systèmes traditionnels à propulseurs.
Le projet s’appuie sur une étude menée par des chercheurs de l’Université Rice et de l’Université de Houston, qui a démontré que le contrôle de la profondeur par piles à combustible pouvait réduire la consommation d’énergie des véhicules sous-marins autonomes jusqu’à 85% par rapport aux conceptions classiques à moteurs à courant continu. Fathi Ghorbel, professeur d’ingénierie mécanique et de bioingénierie à Rice et parrain de l’équipe, est l’un des co-auteurs de cette étude.
Un fonctionnement basé sur l’électrolyse de l’eau
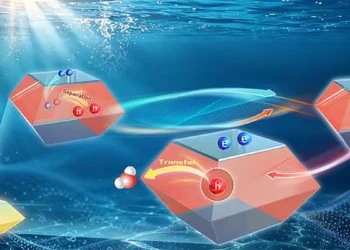
Les dispositifs de contrôle de la flottabilité (BCD) du robot intègrent des piles à combustible réversibles à hydrogène, qui utilisent l’électricité pour transformer l’eau en hydrogène et en oxygène, et vice versa, avec des ballons. Cela permet au robot d’ajuster en douceur sa profondeur avec une consommation d’énergie minimale.
Lorsqu’une tension est appliquée aux piles à combustible, la flottabilité du dispositif augmente grâce à l’eau distillée qui traverse le substrat de la pile et est ionisée en deux gaz. Pour conserver ou récupérer de l’énergie et diminuer la flottabilité, la tension est envoyée dans la direction opposée, ce qui inverse le processus.

Un système de contrôle et de surveillance complet
Le robot intègre également plusieurs capteurs qui collectent des informations sur l’état du système et, surtout, sur la position et l’orientation du dispositif sous l’eau. Ces informations sont transmises à un tableau de bord qui affiche les informations essentielles du système, des graphiques en temps réel de la localisation du robot, une simulation de son orientation relative et une vue de dessus de l’état d’activation des BCD.
Le robot combine un algorithme de stabilisation automatique et un contrôle de la profondeur avec une commande manuelle du véhicule. Un joystick de jeu vidéo a même été intégré pour faciliter le pilotage.
Un projet récompensé et riche en enseignements
Le projet a remporté la deuxième place du Willy Revolution Award for Outstanding Innovation lors du Huff OEDK Engineering Design Showcase annuel, qui s’est tenu à l’Ion le 11 avril.
Pour l’équipe, ce projet a été l’occasion de relever un défi ambitieux en dehors de leur zone de confort et de mettre en pratique leurs compétences en ingénierie. Ils ont dû gérer les interdépendances du système et définir clairement la portée du projet pour se concentrer sur l’essentiel : le dispositif de contrôle de la flottabilité.
Cette expérience leur a permis non seulement d’acquérir de nouvelles connaissances techniques, mais aussi de développer des compétences transversales essentielles pour tout projet d’ingénierie et, plus largement, pour la vie en général.
Légende illustration : Rafe Neathery (Photo Jeff Fitlow/Rice University)