Avec son pouce opposable, ses multiples articulations et sa peau préhensile, la main humaine est souvent considérée comme le summum de la dextérité, et de nombreuses mains robotiques sont conçues à son image. Mais façonnée par le lent processus de l’évolution, la main humaine est loin d’être optimale, avec comme principaux inconvénients nos pouces uniques et asymétriques ainsi que leur attachement à des bras dont la mobilité est limitée.
« Nous pouvons facilement voir les limites de la main humaine lorsqu’on tente d’atteindre des objets sous un meuble ou derrière des étagères, ou lors de tâches simultanées comme tenir une bouteille tout en ramassant un sachet de chips », explique Aude Billard, directrice du Laboratoire d’algorithmes et systèmes d’apprentissage (LASA) à la Faculté des sciences et techniques de l’ingénieur de l’EPFL. « De même, accéder à des objets placés derrière la main tout en maintenant une prise stable peut être extrêmement difficile, nécessitant des contorsions du poignet ou un repositionnement du corps. »
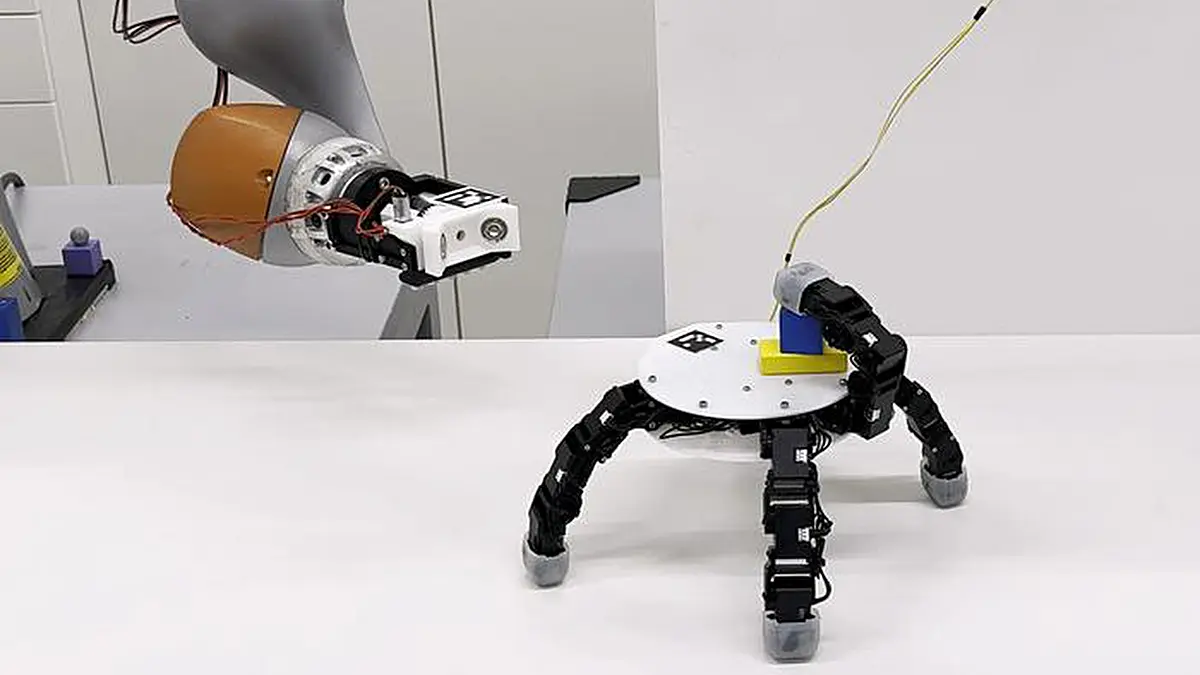
Une équipe composée de Billard, du chercheur du LASA Xiao Gao, et de Kai Junge et Josie Hughes du Laboratoire de conception et fabrication robotiques computationnelles a conçu une main robotique qui surmonte ces défis. Leur dispositif, qui peut supporter jusqu’à six doigts identiques à embout silicone, résout le problème de l’asymétrie humaine en permettant à toute combinaison de doigts de former des paires opposées en pince semblable à un pouce. Grâce à sa conception réversible, le ‘dos’ et la ‘paume’ de la main robotique sont interchangeables. La main peut même se détacher de son bras robotique et ‘ramper’, à la manière d’une araignée, pour saisir et transporter des objets hors de portée du bras.
« Notre dispositif réalise de manière fiable et transparente la ‘manipulation locomotrice’ — une manipulation stationnaire combinée à une mobilité autonome — ce qui, selon nous, présente un grand potentiel pour la robotique industrielle, de service et d’exploration », résume Billard. La recherche a été publiée dans Nature Communications.
Applications humaines – et au-delà
Si la main robotique ressemble à quelque chose d’un film de science-fiction futuriste, les chercheurs affirment qu’ils se sont inspirés de la nature.
« De nombreux organismes ont développé des membres polyvalents qui basculent de manière transparente entre différentes fonctionnalités comme la préhension et la locomotion. Par exemple, la pieuvre utilise ses bras flexibles à la fois pour ramper sur le fond marin et ouvrir des coquillages, tandis que dans le monde des insectes, la mante religieuse utilise des membres spécialisés pour la locomotion et la capture de proies », explique Billard.
En effet, le robot de l’EPFL peut ramper tout en maintenant une prise sur plusieurs objets, les tenant sous sa ‘paume’, sur son ‘dos’, ou les deux. Avec cinq doigts, le dispositif peut reproduire la plupart des prises humaines traditionnelles. Lorsqu’il est équipé de plus de cinq doigts, il peut accomplir à lui seul des tâches nécessitant habituellement deux mains humaines – comme dévisser le bouchon d’une grande bouteille ou visser une vis dans un bloc de bois avec un tournevis.
« Il n’y a pas de réelle limitation quant au nombre d’objets qu’il peut tenir ; si nous devons tenir plus d’objets, nous ajoutons simplement plus de doigts », déclare Billard.
Les chercheurs prévoient des applications de leur conception innovante dans des environnements réels exigeant compacité, adaptabilité et interaction multimodale. Par exemple, la technologie pourrait être utilisée pour récupérer des objets dans des espaces confinés ou étendre la portée des bras industriels traditionnels. Et si la main robotique proposée n’est pas elle-même anthropomorphique, ils pensent également qu’elle pourrait être adaptée à des applications prothétiques.
« La fonctionnalité symétrique et réversible est particulièrement précieuse dans les scénarios où les utilisateurs pourraient bénéficier de capacités dépassant la fonction humaine normale », explique Billard. « Par exemple, des études antérieures avec des utilisateurs de doigts robotiques supplémentaires démontrent la remarquable adaptabilité du cerveau pour intégrer des appendices supplémentaires, suggérant que notre configuration non traditionnelle pourrait même servir dans des environnements spécialisés nécessitant des capacités de manipulation augmentées. »
Article : A Detachable Crawling Robotic Hand – Journal : Nature Communications – Méthode : Experimental study – DOI : Lien vers l’étude
Source : EPFL