Des ingénieurs de l’Université d’Oxford ont développé une méthode rapide et ultra-économique pour fabriquer des robots souples en utilisant du matériel de laboratoire courant. La méthode a été publiée aujourd’hui (8 mars) dans Advanced Science.
La nouvelle technique permet aux chercheurs de fabriquer des actuateurs robotiques souples – les composants flexibles qui génèrent le mouvement – en moins de 10 minutes pour un coût matériel inférieur à 0,10 $ (dollars américains) par unité.
Le chercheur principal et auteur correspondant Professeur Antonio Forte (Département de Science de l’Ingénierie, Université d’Oxford) affirme : « En abaissant les barrières financières et techniques à la fabrication, cette avancée pourrait significativement démocratiser et accélérer la recherche et le prototypage en robotique douce à travers les laboratoires, les start-ups et les milieux éducatifs. »
Les robots souples, fabriqués à partir de matériaux conformes qui se plient et se déforment, sont de plus en plus utilisés dans des applications allant de la manipulation d’objets délicats aux technologies de recherche et sauvetage. Cependant, les méthodes de fabrication traditionnelles reposent souvent sur le moulage de silicone, des systèmes d’impression 3D spécialisés ou des processus complexes de stratification textile – autant d’approches qui peuvent être chronophages, coûteuses et nécessiter un équipement important.
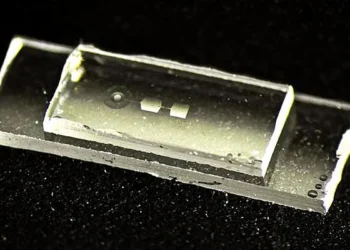
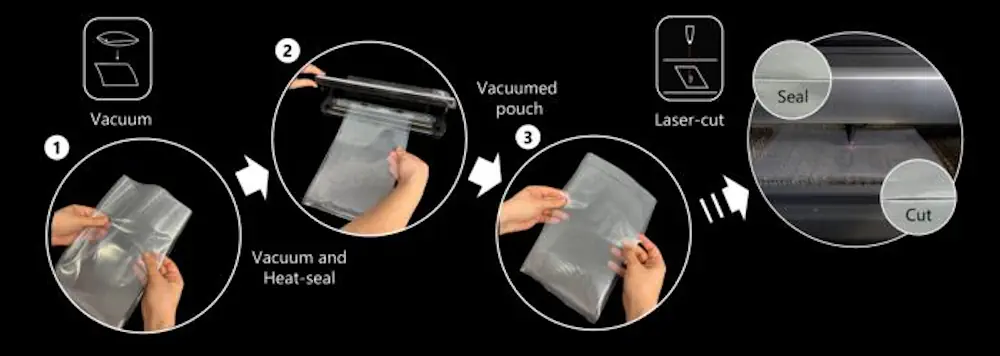
La nouvelle approche de l’équipe d’Oxford combine des sachets plastiques scellables sous vide disponibles dans le commerce avec une découpe laser de précision. En retirant l’air entre les couches avant le traitement laser, les chercheurs peuvent à la fois sceller et façonner des structures gonflables avec une grande précision, créant ainsi des actuateurs de flexion programmables en une seule étape de découpe et de scellement.
Le processus ne nécessite que trois composants : des sachets thermoplastiques scellables sous vide (coûtant moins de 10 cents par actuateur) ; une machine à sceller sous vide standard ; une découpeuse laser ou un graveur laser de bureau.
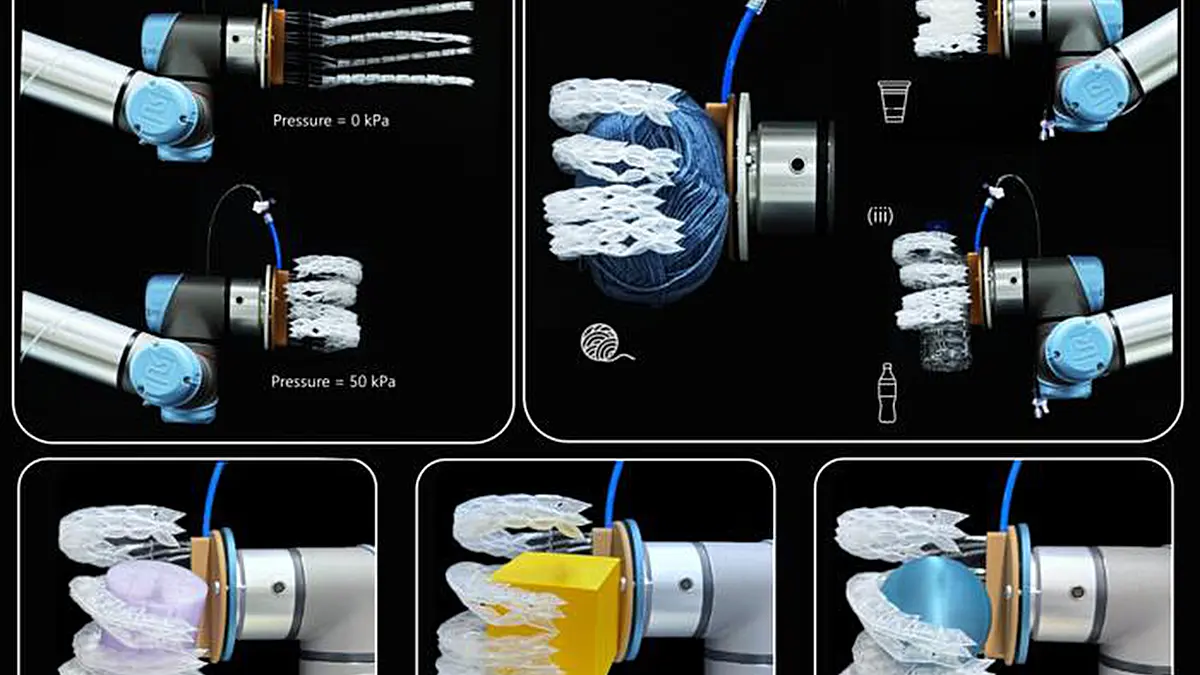
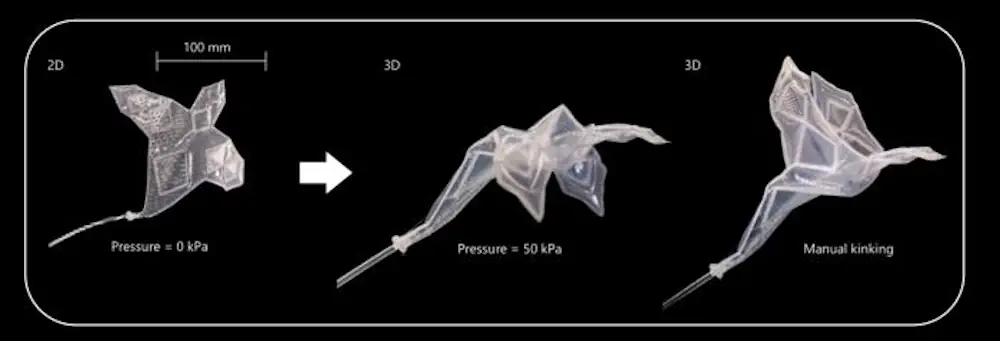
Une fois fabriqués, les actuateurs gonflables se plient de manière prévisible lorsqu’ils sont pressurisés, permettant des mouvements complexes et programmables. En utilisant cette approche, l’équipe a construit une pince robotique souple capable de soulever 25 fois son propre poids, ainsi que des robots rampants et nageurs ultra-légers.
Le premier auteur, le chercheur postdoctoral Ashkan Rezanejad (Département de Science de l’Ingénierie, Université d’Oxford) explique : « Avec cette approche, nous avons même produit des structures animales gonflables, notamment des tortues et des grues. En permettant des projets créatifs et artistiques, notre méthode pourrait être particulièrement précieuse pour l’éducation et pour attirer les étudiants vers la robotique douce. »
Au-delà des économies de coûts, l’équipe a systématiquement testé les performances mécaniques et la durabilité des actuateurs. Les structures thermoplastiques ont démontré de fortes forces de sortie à des pressions relativement basses et ont pu résister jusqu’à 100 000 cycles de gonflage-dégonflage lors des tests de durabilité.
Les chercheurs ont également développé un cadre de conception computationnelle qui permet aux ingénieurs de « programmer » la façon dont les actuateurs se plient en ajustant les paramètres géométriques. Cela permet la création de formes prévisibles, y compris des spirales et des structures en forme de lettres.
Les systèmes robotiques souples sont explorés pour des applications incluant des dispositifs médicaux peu invasifs, des technologies portables, des outils de fabrication adaptatifs et l’exploration d’environnements dangereux. Réduire la complexité de fabrication peut aider les chercheurs à itérer plus rapidement et à mettre à l’échelle de nouvelles conceptions plus efficacement.
Dans de futurs travaux, les chercheurs entendent explorer d’autres matériaux thermoplastiques compatibles et comment la méthode pourrait être adaptée pour permettre des mouvements plus complexes, tels que la torsion et les mouvements multidirectionnels.
Article : Vacuum–laser fabrication of programmable soft actuators – Journal : Advanced Science
Source : Oxford U.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.