Des chercheurs de l’UCL et de l’université de Cambridge ont mis au point une « peau » robotique peu coûteuse, durable et très sensible qui permet aux robots de détecter des informations sur leur environnement d’une manière similaire à celle des humains.
L’étude, publiée dans Science Robotics , détaille le développement de la peau souple et conductrice, qui est facile à fabriquer et peut être fondue et façonnée dans une large gamme de formes complexes. Bien que la peau robotique ne soit pas aussi sensible que la peau humaine, elle peut détecter des signaux provenant de plus de 860 000 minuscules voies dans le matériau.
Contrairement à d’autres solutions pour le toucher robotique, qui fonctionnent généralement à l’aide de capteurs intégrés dans des zones spécifiques et nécessitent différents capteurs pour détecter différents types de toucher, l’ensemble de la peau électronique est un capteur qui peut reconnaître différents types de toucher et de pression, tels que la pression d’un doigt, une surface chaude ou froide, les dommages causés par des objets tranchants, ou plusieurs points touchés en même temps.
Les chercheurs ont utilisé une combinaison de tests physiques et de techniques d’apprentissage automatique pour aider la peau robotisée à « apprendre » lesquelles de ces voies sont les plus importantes, afin de détecter plus efficacement les différents types de contact.
Outre les applications futures potentielles pour les robots humanoïdes ou les prothèses humaines où le sens du toucher est vital, les chercheurs affirment que la peau robotique pourrait être utile dans des secteurs aussi variés que l’automobile ou les secours en cas de catastrophe.
Le Dr Thomas George Thuruthel, co-auteur de l’étude à l’UCL Computer Science, a déclaré : « Nous n’en sommes pas encore au stade où la peau robotique est aussi bonne que la peau humaine, mais nous pensons qu’elle est meilleure que tout ce qui existe à l’heure actuelle. Notre méthode est flexible et plus facile à construire que les capteurs traditionnels, et nous sommes en mesure de la calibrer en utilisant le toucher humain pour toute une série de tâches ».
Les peaux électroniques fonctionnent en convertissant des informations physiques – comme la pression ou la température – en signaux électroniques. Dans la plupart des cas, différents types de capteurs sont nécessaires pour différents types de toucher – un type de capteur pour détecter la pression, un autre pour la température, etc. Cependant, les signaux de ces différents capteurs peuvent interférer entre eux et les matériaux sont facilement endommagés.
Le Dr David Hardman, auteur principal de l’étude au département d’ingénierie de Cambridge, a déclaré : « Le fait d’avoir différents capteurs pour différents types de toucher conduit à des matériaux complexes à fabriquer. Nous voulions mettre au point une solution capable de détecter plusieurs types de toucher à la fois, mais dans un seul matériau ».
La nouvelle technologie utilise un type de capteur qui réagit différemment aux différents types de toucher, ce que l’on appelle la détection multimodale. Bien qu’il soit difficile de déterminer la cause de chaque signal, les matériaux de détection multimodale sont plus faciles à fabriquer et plus robustes.
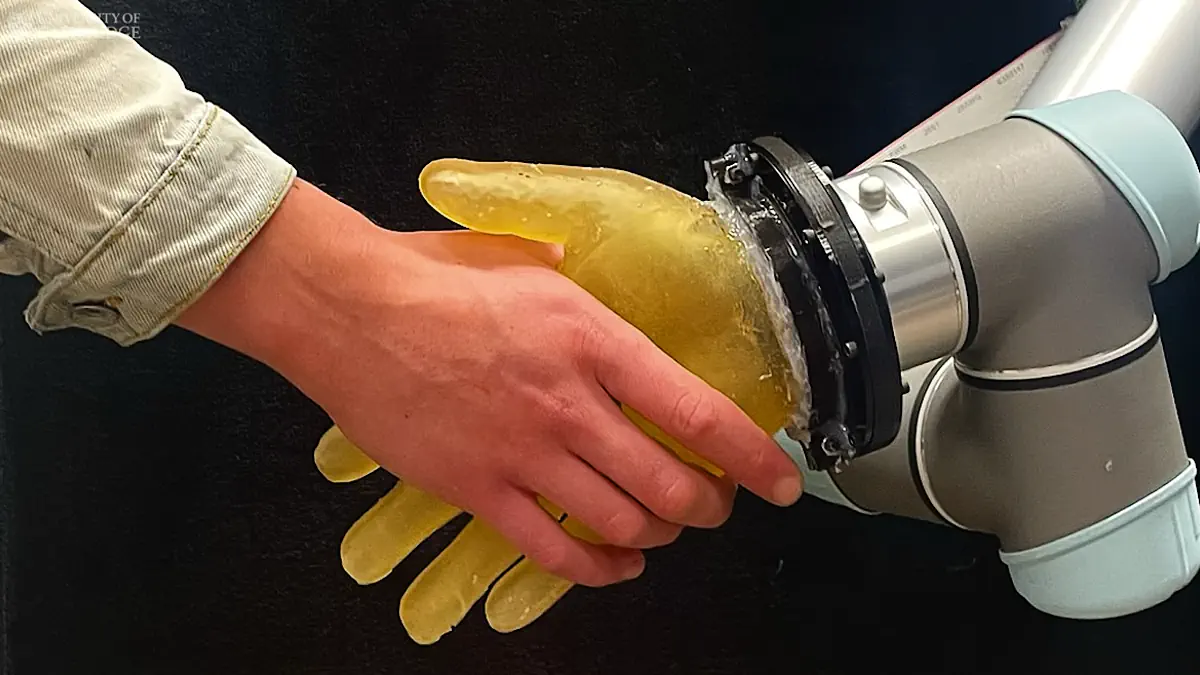
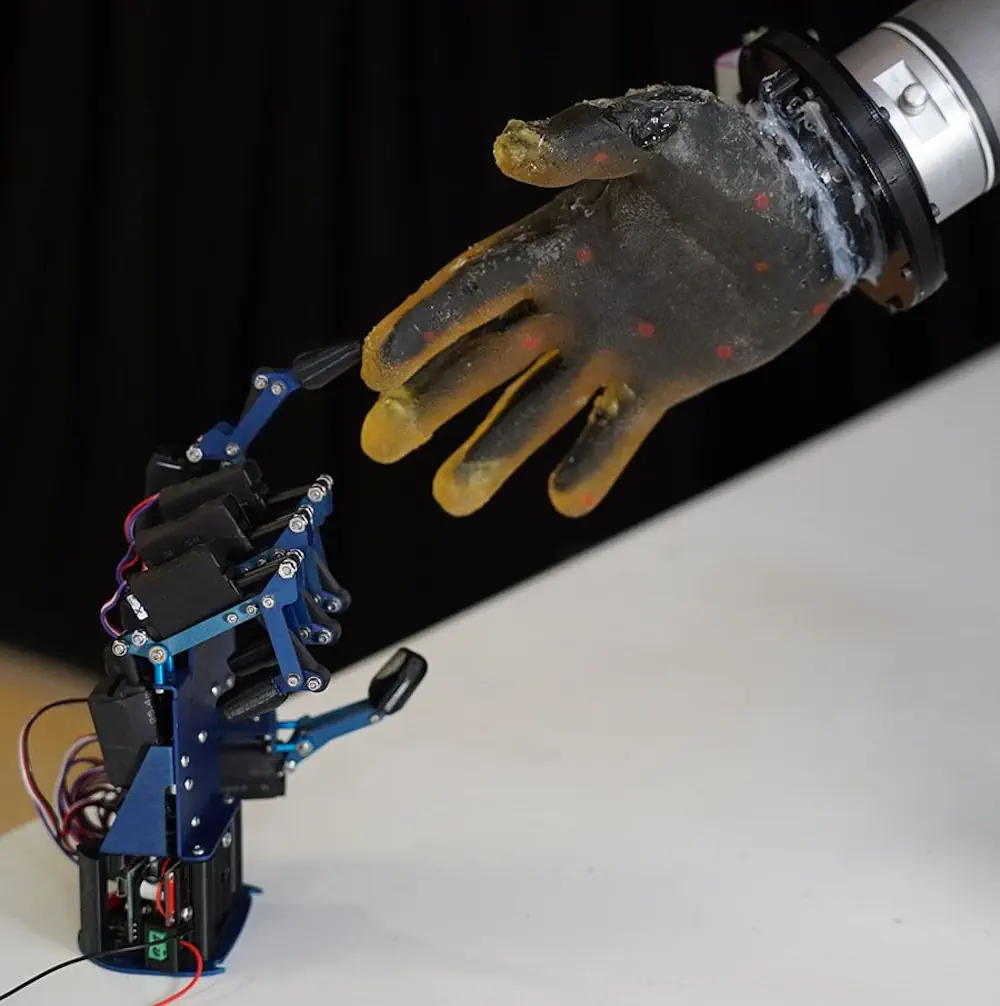
Les chercheurs ont fait fondre un hydrogel à base de gélatine, souple, extensible et conducteur d’électricité, et l’ont moulé pour lui donner la forme d’une main humaine. Ils ont testé toute une série de configurations d’électrodes pour déterminer celles qui leur fournissaient les informations les plus utiles sur les différents types de toucher. À partir de 32 électrodes placées au poignet, ils ont pu recueillir plus de 1,7 million d’informations sur l’ensemble de la main, grâce aux minuscules voies du matériau conducteur.
La peau a ensuite été testée pour différents types de toucher. Les chercheurs l’ont exposée à un pistolet thermique, l’ont pressée avec leurs doigts et un bras robotisé, l’ont touchée délicatement avec leurs doigts et l’ont même coupée avec un scalpel. L’équipe a ensuite utilisé les données recueillies au cours de ces tests pour former un modèle d’apprentissage automatique afin que la main reconnaisse la signification des différents types de toucher.
Le Dr Hardman ajoute : « Nous sommes en mesure d’extraire beaucoup d’informations de ces matériaux – ils peuvent prendre des milliers de mesures très rapidement. Ils mesurent beaucoup de choses différentes en même temps, sur une grande surface ».
À l’avenir, les chercheurs espèrent améliorer la durabilité de la peau électronique et effectuer d’autres tests sur des tâches robotiques réelles.
La recherche a été soutenue par le Samsung Global Research Outreach Program, la Royal Society et le Engineering and Physical Sciences Research Council (EPSRC), qui fait partie du UK Research and Innovation (UKRI).
David Hardman, Thomas George Thuruthel, Fumiya Iida. ‘Multimodal information structuring using single layer soft sensory skins and high-density electrical impedance tomography.’ Science Robotics (2025). DOI: 10.1126/scirobotics.adq2303
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.