

L’Université Waseda et le Comité international de la Croix-Rouge (CICR) ont signé un accord de coopération en 2018. Depuis, ils mènent conjointement des recherches et développent des solutions pour détecter les mines terrestres et les munitions non explosées. Dans ce cadre, le professeur Hideyuki Sawada de la Faculté des sciences et de l’ingénierie travaille sur la détection des mines terrestres enfouies à l’aide de drones et de l’IA. Comment les technologies de pointe peuvent-elles contribuer à résoudre des problèmes à l’échelle humaine ?
Cet article présente les résultats des recherches du professeur Sawada.
Les mines terrestres qui subsistent dans le monde et les défis posés par les efforts de déminage
Il reste de nombreuses mines terrestres dans le monde, et les décès et blessures accidentels continuent. Elles doivent être enlevées dès que possible, mais les méthodes conventionnelles utilisant des capteurs de détection des métaux et d’autres dispositifs similaires ne garantissent pas suffisamment la sécurité de l’opérateur, et de nombreuses victimes ont été signalées au cours de l’opération. En outre, l’efficacité est insuffisante et, dans de nombreuses régions, l’enlèvement ne progresse pas en raison d’obstacles financiers.
Dans ce contexte, on cherche un moyen de détecter à distance l’emplacement des mines terrestres avec une grande précision. Dans le but commun de fournir une aide humanitaire, l’université de Waseda et le CICR ont entamé des recherches conjointes pour trouver une solution. Le professeur Sawada, qui étudie la robotique et le traitement des images, y participe.
« Avant le conflit ukrainien, on disait qu’il restait plus de 100 millions de mines terrestres dans le monde, et on pense aujourd’hui que ce nombre a augmenté. Le CICR, qui travaille à leur élimination, a entamé des recherches sur un système de détection des mines efficace et facile à utiliser, utilisant les TIC, en collaboration avec l’Institut de recherche Waseda pour la science et l’ingénierie, spécialisé dans l’IA et la robotique. J’avais fait des recherches sur les drones et la reconnaissance d’images, j’ai donc décidé de coopérer avec eux parce que je voulais appliquer ces recherches au déminage ».
L’une des raisons pour lesquelles les méthodes traditionnelles de déminage sont risquées est que les obstacles tels que le terrain, la végétation et les fragments de métal dispersés rendent difficile la détection précise des mines terrestres. Afin d’améliorer la sécurité et l’efficacité, une méthode utilisant des drones pour prendre des images du sol et détecter l’emplacement des mines terrestres à l’aide de l’IA a attiré l’attention, mais il n’est pas facile de réduire les cas de non-détection et de fausse détection. Le professeur Sawada s’est concentré sur les caméras montées sur les drones.
« Aujourd’hui, l’apprentissage automatique utilise principalement des caméras RVB pour reconnaître les images, qui capturent des informations sur les couleurs. Cependant, les mines terrestres enfouies sous terre ne peuvent pas être identifiées en tant qu’images, et les caméras RVB sont donc inefficaces. Il en va de même pour les mines terrestres dispersées en surface si elles sont recouvertes de sable, de poussière ou de végétation. Pour résoudre ce problème, nous avons mis au point une méthode utilisant une caméra IR (infrarouge) ».

La détection thermique et l’apprentissage automatique améliorent la précision de la détection des mines terrestres
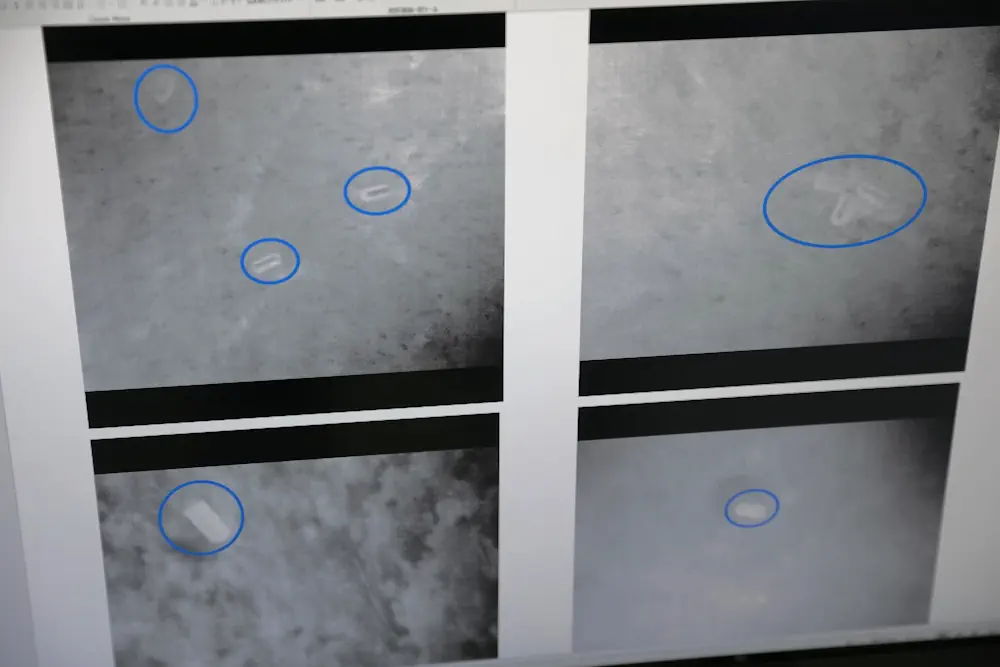
En équipant un drone d’une caméra IR qui utilise les propriétés de la lumière infrarouge pour imager l’énergie thermique, il devient possible de prendre des images IR (infrarouges). Le professeur Sawada développe un système qui utilise l’apprentissage automatique pour reconnaître l’emplacement et le type de mines terrestres sur la base des images infrarouges capturées.
« La technologie que nous utilisons est la détection thermique, qui détecte et visualise l’énergie thermique émise par un objet. Les différences d’énergie thermique des objets apparaissent comme des différences de luminosité dans les images IR. L’émissivité d’un objet varie en fonction de ses propriétés physiques, telles que le matériau et la température, tandis que sa conductivité thermique varie en fonction de l’humidité de l’objet et de son environnement. Si nous parvenons à distinguer les mines terrestres du sol ou de la végétation sur la base des différences de luminosité obtenues à partir des images IR, nous pourrons estimer leur emplacement même si elles sont enfouies quelque peu sous terre, et également distinguer le type de mines terrestres ».
Les recherches sont également menées sur le terrain, avec des expériences dans le nord du Danemark, où des mines terrestres ont été enfouies à environ 1 cm sous terre et des images ont été prises depuis le ciel par un drone équipé d’une caméra infrarouge et d’une caméra RVB. Un ensemble de données a ensuite été créé à partir des images collectées et l’apprentissage automatique a été mis en œuvre.
« L’utilisation de l’apprentissage automatique pour traiter rapidement et avec précision de grandes quantités de données peut améliorer considérablement les opérations de déminage. Nous pensons qu’un réseau neuronal convolutif (CNN), qui excelle dans la reconnaissance des caractéristiques des objets dans les images, serait efficace, et nous continuerons à construire un système de reconnaissance utilisant l’apprentissage profond (DL). »
Le DL est composé de trois couches : « Backbone », “Neck” et “Head”, chacune remplissant une fonction spécifique, ce qui lui permet d’analyser et d’extraire rapidement les caractéristiques des objets dans les images.
« Dans l’expérience danoise, un ensemble de données a été créé à partir de 398 images et l’apprentissage automatique a été effectué. 81 images ont ensuite été saisies et il a été demandé au système de prédire l’emplacement des mines terrestres. Le système a pu faire des prédictions correctes pour toutes les images. Des expériences similaires ont également été menées en Jordanie, avec des résultats similaires. Cependant, certains résultats ont été jugés peu fiables et la végétation environnante a été détectée par erreur comme étant des mines terrestres. La cause supposée de ce phénomène est que l’émissivité et la conductivité thermique varient en fonction des conditions du sol, telles que la température et l’humidité de la surface, ce qui entraîne des différences dans les valeurs de luminosité des images IR ».
Afin d’améliorer le score de fiabilité et de réduire les faux positifs, il est nécessaire d’augmenter la quantité de données d’images utilisées pour l’entraînement et les types de mines terrestres à étiqueter.
« En matière d’apprentissage automatique, les performances dépendent de la quantité de données collectées et utilisées pour l’apprentissage. À l’avenir, il sera nécessaire d’acquérir des images IR prises dans différentes conditions, telles que la profondeur d’enfouissement, l’altitude de prise de vue, les conditions météorologiques et la température, et de les ajouter à l’ensemble de données d’apprentissage. En outre, nous devrons étiqueter les objets autres que les mines et les variables environnementales susceptibles de fausser la reconnaissance. Dans un premier temps, nous avons pu démontrer l’efficacité de l’installation d’une caméra infrarouge sur un drone et de l’apprentissage automatique basé sur les images infrarouges ».
Une technologie de drone et d’IA qui peut être appliquée à divers sites
Le projet de recherche du professeur Sawada nécessite une mise en œuvre immédiate. Quel type d’activités de recherche va-t-il mener dans la prochaine étape ?
« La première étape consiste à collecter des données. Nous travaillons actuellement avec le CICR pour nous préparer à effectuer des tests sur le terrain une fois que le conflit en Ukraine aura pris fin et que la sécurité sera assurée. Dans les zones où le conflit est terminé, il sera nécessaire de restaurer les infrastructures et les habitations, mais pour ce faire, nous devons d’abord enlever les mines terrestres et préparer un environnement dans lequel le travail pourra être effectué. Nous devrons mettre en commun les technologies du monde entier, y compris les nôtres ».
Le professeur Sawada espère que les connaissances acquises dans le cadre de ce projet pourront être appliquées à la résolution d’autres problèmes sociaux.
« Cette technologie peut être utile non seulement pour l’enlèvement d’armes telles que les munitions non explosées, qui sont devenues un sujet brûlant au Japon, mais aussi en cas de catastrophe. Par exemple, lors du sauvetage de personnes dans des maisons qui se sont effondrées à la suite d’un tremblement de terre, la détection de la température émise par le corps humain permettrait une intervention rapide. La clé pour éliminer les armes et sauver des vies est le processus initial de « découverte ». Nous continuerons à mener des activités de recherche et de développement à l’avenir, en intégrant les technologies de la robotique et de l’intelligence artificielle afin de fournir des solutions adaptées à chaque problème. ».
Source : U. Waseda
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.

















