Dans le domaine de la prothèse robotique, une nouvelle étude américaine apporte une contribution significative. Elle révèle que les chevilles prothétiques robotiques, contrôlées par des impulsions nerveuses, permettent aux amputés de se déplacer de manière plus « naturelle », améliorant ainsi leur stabilité.
Contrôle postural et prothèses robotiques
Le travail de recherche s’est concentré sur le « contrôle postural », un aspect étonnamment complexe de notre physiologie. Comme l’explique Helen Huang, auteur de l’étude et professeur au sein du département conjoint de génie biomédical de l’Université d’État de Caroline du Nord et de l’Université de Caroline du Nord à Chapel Hill, « lorsque nous sommes immobiles, nos corps font constamment des ajustements pour nous maintenir stables ».
Par exemple, si quelqu’un nous bouscule alors que nous faisons la queue, nos jambes effectuent une série de mouvements dont nous ne sommes pas nécessairement conscients pour nous maintenir debout. Les personnes ayant subi une amputation du membre inférieur rapportent que l’obtention de cette sorte de stabilité avec des dispositifs prothétiques est un défi significatif.
Des chevilles prothétiques contrôlées par des signaux EMG
Les chercheurs ont travaillé avec cinq personnes ayant subi une amputation sous le genou d’une jambe. Les participants à l’étude ont été équipés d’une cheville prothétique robotique prototype qui répond aux signaux EMG (électromyographiques) captés par des capteurs sur la jambe.
Comme l’explique Aaron Fleming, co-auteur de l’étude et récent docteur de NC State, « les capteurs sont placés sur les muscles au site de l’amputation. Lorsqu’un participant à l’étude pense à bouger le membre amputé, cela envoie des signaux électriques à travers le muscle résiduel dans le membre inférieur. Les capteurs captent ces signaux à travers la peau et traduisent ces signaux en commandes pour le dispositif prothétique ».
Des résultats prometteurs
Les chercheurs ont constaté que les participants à l’étude étaient nettement plus stables lorsqu’ils utilisaient le prototype robotique. Ils étaient moins susceptibles de trébucher ou de tomber. Plus précisément, le prototype robotique a permis aux participants à l’étude de changer leur stratégie de contrôle postural.
Comme le souligne Helen Huang, « pour les personnes qui ont leur membre inférieur intact, la stabilité posturale commence à la cheville. Pour les personnes qui ont perdu leur membre inférieur, elles doivent normalement compenser le manque de contrôle de la cheville. Nous avons constaté que l’utilisation de la cheville robotique qui répond aux signaux EMG permet aux utilisateurs de revenir à leur réponse instinctive pour maintenir la stabilité ».
En synthèse
Cette étude démontre que les chevilles prothétiques robotiques contrôlées par des signaux EMG sont exceptionnellement efficaces pour permettre aux utilisateurs d’atteindre une stabilité naturelle. Les chercheurs sont maintenant en train de mener un essai plus large avec plus de personnes pour démontrer les effets de la technologie et identifier les individus qui pourraient en bénéficier le plus.
Pour une meilleure compréhension
1. Qu’est-ce que le contrôle postural et pourquoi est-il important ?
Le contrôle postural est un aspect complexe de notre physiologie qui nous permet de maintenir notre stabilité lorsque nous sommes immobiles. Notre corps fait constamment des ajustements pour nous maintenir stables, par exemple, si quelqu’un nous bouscule, nos jambes effectuent une série de mouvements pour nous maintenir debout. Pour les personnes ayant subi une amputation du membre inférieur, obtenir cette stabilité avec des dispositifs prothétiques est un défi significatif.
2. Comment fonctionnent les chevilles prothétiques contrôlées par des signaux EMG ?
Les chevilles prothétiques robotiques répondent aux signaux EMG (électromyographiques) captés par des capteurs sur la jambe. Lorsqu’un utilisateur pense à bouger le membre amputé, cela envoie des signaux électriques à travers le muscle résiduel dans le membre inférieur. Les capteurs captent ces signaux à travers la peau et traduisent ces signaux en commandes pour le dispositif prothétique.
3. Quels sont les avantages des chevilles prothétiques contrôlées par des signaux EMG
Les utilisateurs de ces chevilles prothétiques robotiques sont nettement plus stables et moins susceptibles de trébucher ou de tomber. De plus, ces dispositifs permettent aux utilisateurs de changer leur stratégie de contrôle postural et de revenir à leur réponse instinctive pour maintenir la stabilité.
4. Quels sont les résultats de l’étude sur ces chevilles prothétiques robotiques ?
L’étude a démontré que les chevilles prothétiques robotiques contrôlées par des signaux EMG sont exceptionnellement efficaces pour permettre aux utilisateurs d’atteindre une stabilité naturelle. Les chercheurs sont maintenant en train de mener un essai plus large avec plus de personnes pour démontrer les effets de la technologie et identifier les individus qui pourraient en bénéficier le plus.
5. Quelle est la prochaine étape pour cette technologie ?
Les chercheurs mènent actuellement un essai plus large avec plus de personnes pour démontrer les effets de la technologie et identifier les individus qui pourraient en bénéficier le plus. Ils espèrent que cette technologie pourra améliorer la qualité de vie des personnes ayant subi une amputation du membre inférieur.
Un article sur l’étude, “Neural Prosthesis Control Restores Near-Normative Neuromechanics in Standing Postural Control,” est publié dans la revue Science Robotics. L’article a été cosigné par Wentao Liu, doctorant au sein du département commun d’ingénierie biomédicale.
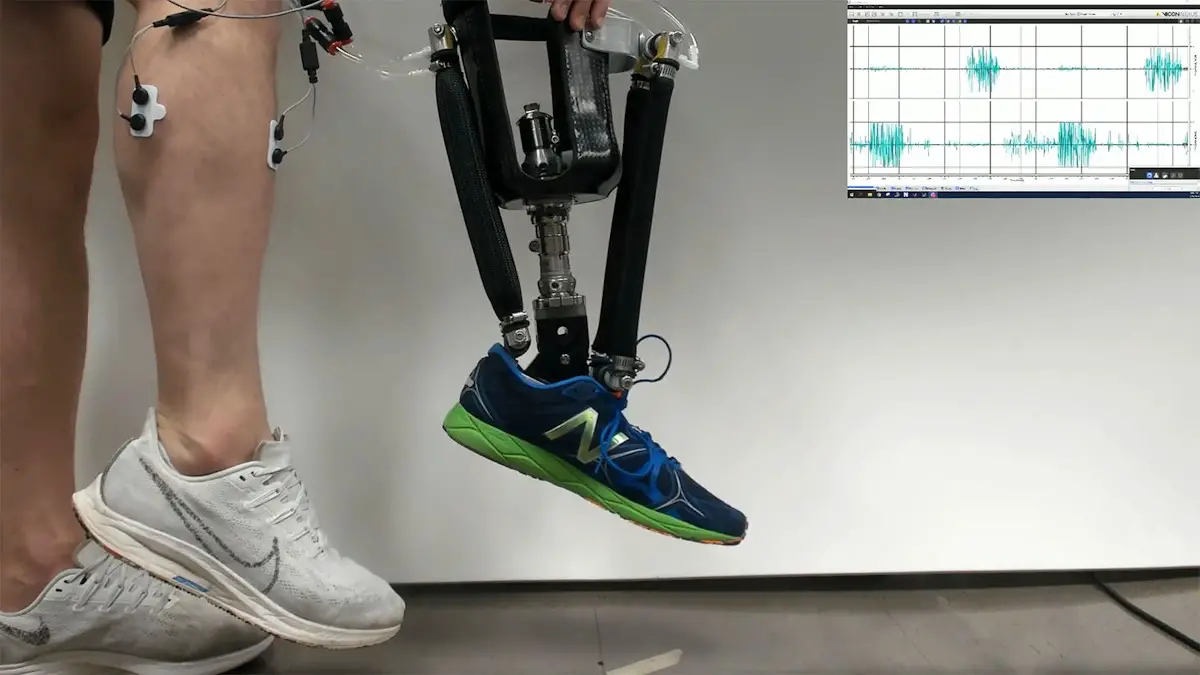
Légende illustration principale : Démonstration de la cheville prothétique robotisée. Les capteurs électromyographiques (sur le mollet à gauche) captent l’activité électrique générée par les muscles lorsqu’ils sont fléchis. Ce signal indique à la prothèse quel muscle artificiel doit être fléchi et dans quelle mesure. Pour les personnes amputées, ces capteurs sont placés dans l’emboîture de la prothèse. Le graphique (à droite) montre le signal électromyographique, qui est utilisé pour contrôler la prothèse. Crédit photo : Aaron Fleming.