Adrienne Berard
Les microrobots modélisés dans les simulations communiquent par le son pour former des « essaims acoustiques » et se déplacer collectivement.
Des animaux comme les chauves-souris, les baleines et les insectes utilisent depuis longtemps des signaux acoustiques pour communiquer et naviguer. Aujourd’hui, une équipe internationale de scientifiques s’est inspirée de la nature pour modéliser des robots de très petite taille qui utilisent les ondes sonores pour se coordonner en grands essaims qui affichent un comportement intelligent. Selon Igor Aronson, chef d’équipe et titulaire de la chaire Huck d’ingénierie biomédicale, de chimie et de mathématiques à Penn State, ces groupes de robots pourraient un jour accomplir des tâches complexes telles que l’exploration de zones sinistrées, la dépollution ou l’administration de traitements médicaux à l’intérieur du corps.
« Imaginez des essaims d’abeilles ou de moucherons. Ils se déplacent, ce qui crée un son, et le son assure leur cohésion, de nombreux individus agissant comme un seul. » indique M. Aronson.
Étant donné que les essaims de micromachines miniatures émettant des sons sont auto-organisés, ils peuvent naviguer dans des espaces restreints et même se reformer s’ils sont déformés. L’intelligence collective – ou émergente – des essaims pourrait un jour être exploitée pour effectuer des tâches telles que la dépollution d’environnements contaminés, a t-il expliqué.
Au-delà de l’environnement, les essaims de robots pourraient potentiellement fonctionner à l’intérieur du corps, par exemple pour acheminer des médicaments directement vers une zone problématique. Leur capacité de détection collective aide également à détecter les changements dans l’environnement, et leur capacité à « s’auto-réparer » leur permet de continuer à fonctionner comme une unité collective même après s’être séparés, ce qui pourrait être particulièrement utile pour la détection des menaces et les applications de capteurs.
« Cela représente un bond en avant significatif vers la création de microrobots plus intelligents, plus résistants et, en fin de compte, plus utiles, avec une complexité minimale, capables de s’attaquer à certains des problèmes les plus difficiles de notre monde », a-t-il ajouté. « Les conclusions de cette recherche sont cruciales pour la conception de la prochaine génération de microrobots, capables d’effectuer des tâches complexes et de réagir à des signaux externes dans des environnements difficiles. »
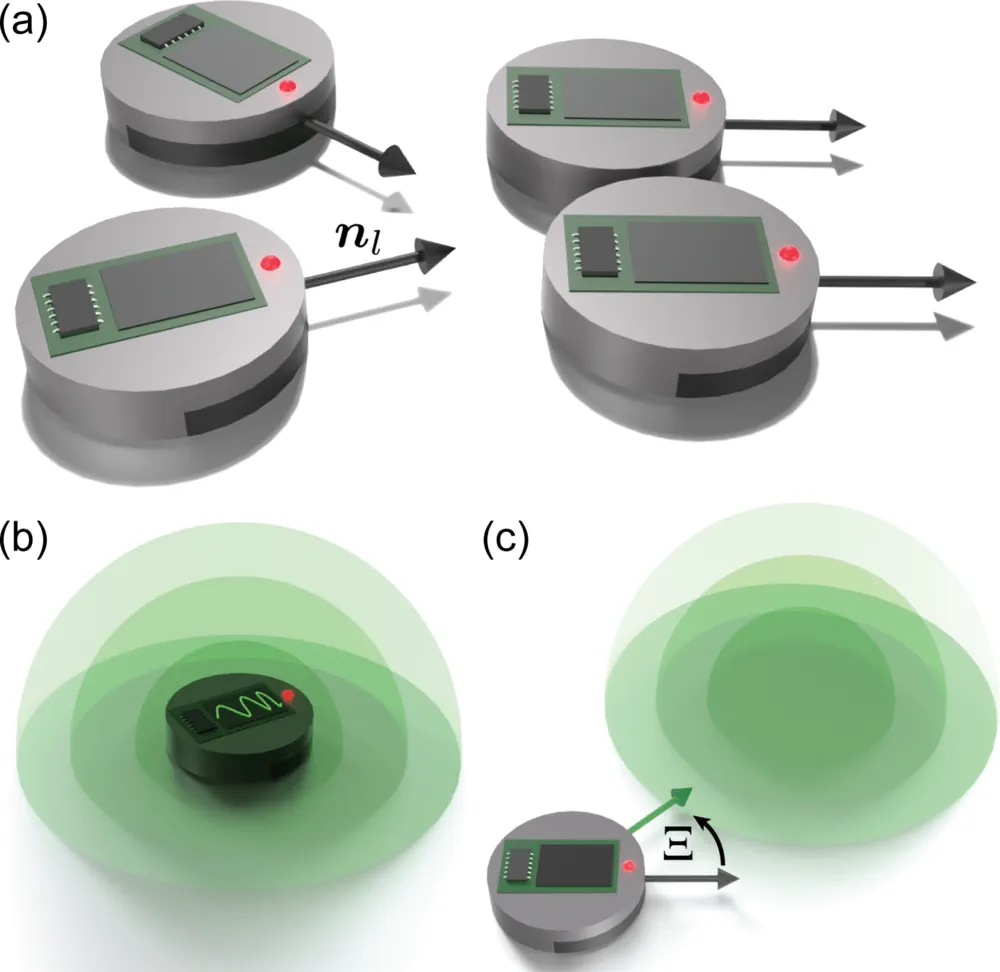
Pour cette étude, l’équipe a développé un modèle informatique permettant de suivre les mouvements de minuscules robots, chacun équipé d’un émetteur acoustique et d’un détecteur. Ils ont découvert que la communication acoustique permettait aux agents robotiques individuels de travailler ensemble de manière transparente, en adaptant leur forme et leur comportement à leur environnement, un peu comme un banc de poissons ou une volée d’oiseaux.
Bien que les robots présentés dans l’article soient des agents computationnels dans un modèle théorique (ou basé sur des agents) plutôt que des dispositifs physiques fabriqués, les simulations ont permis d’observer l’émergence d’une intelligence collective qui apparaîtrait probablement dans toute étude expérimentale de conception similaire.
« Nous ne nous attendions pas à ce que nos modèles montrent un tel niveau de cohésion et d’intelligence à partir de robots aussi simples. Il s’agit de circuits électroniques très simples. Chaque robot peut se déplacer dans une certaine direction, il est équipé d’un moteur, d’un petit microphone, d’un haut-parleur et d’un oscillateur. C’est tout, mais il est néanmoins capable d’intelligence collective. Il synchronise son propre oscillateur à la fréquence du champ acoustique de l’essaim et migre vers le signal le plus fort. » observe encore M. Aronson.
Cette découverte marque une nouvelle étape importante dans un domaine émergent appelé « matière active », qui étudie le comportement collectif d’agents biologiques et synthétiques microscopiques autopropulsés, des essaims de bactéries ou de cellules vivantes aux microrobots. Elle montre pour la première fois que les ondes sonores peuvent servir à contrôler des robots de taille microscopique. Jusqu’à présent, les particules de matière active étaient principalement contrôlées par des signaux chimiques.
« Les ondes acoustiques fonctionnent beaucoup mieux pour la communication que la signalisation chimique », a conclu M. Aronson. « Les ondes sonores se propagent plus rapidement et plus loin, presque sans perte d’énergie, et leur conception est beaucoup plus simple. Les robots s’« entendent » et se « trouvent » efficacement les uns les autres, ce qui conduit à une auto-organisation collective. Chaque élément est très simple. L’intelligence collective et la fonctionnalité résultent d’ingrédients minimaux et d’une communication acoustique simple. »
Article : « Acoustic Signaling Enables Collective Perception and Control in Active Matter Systems » – DOI : 10.1103/m1hl-d18s
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.