La science des microrobots connaît des développements qui pourraient transformer la médecine et l’ingénierie. Des chercheurs sud-coréens ont mis au point des essaims de robots magnétiques minuscules capables de coopérer pour réaliser des tâches impressionnantes, allant de la navigation dans des environnements complexes à l’assistance médicale. Voici comment ces innovations pourraient redéfinir notre approche des défis techniques et biologiques.
Des scientifiques de l’Université Hanyang à Séoul ont réussi à développer des essaims de microrobots magnétiques, inspirés par le comportement collectif des fourmis. Leur travail, publié le 18 décembre dans le journal Device, montre que ces essaims peuvent effectuer des tâches complexes sous l’influence d’un champ magnétique rotatif. Ces microrobots, bien que petits, montrent une adaptabilité et une autonomie remarquables.
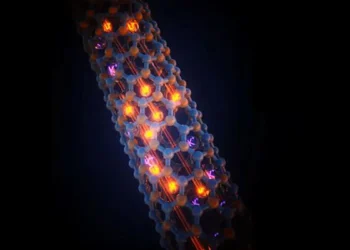
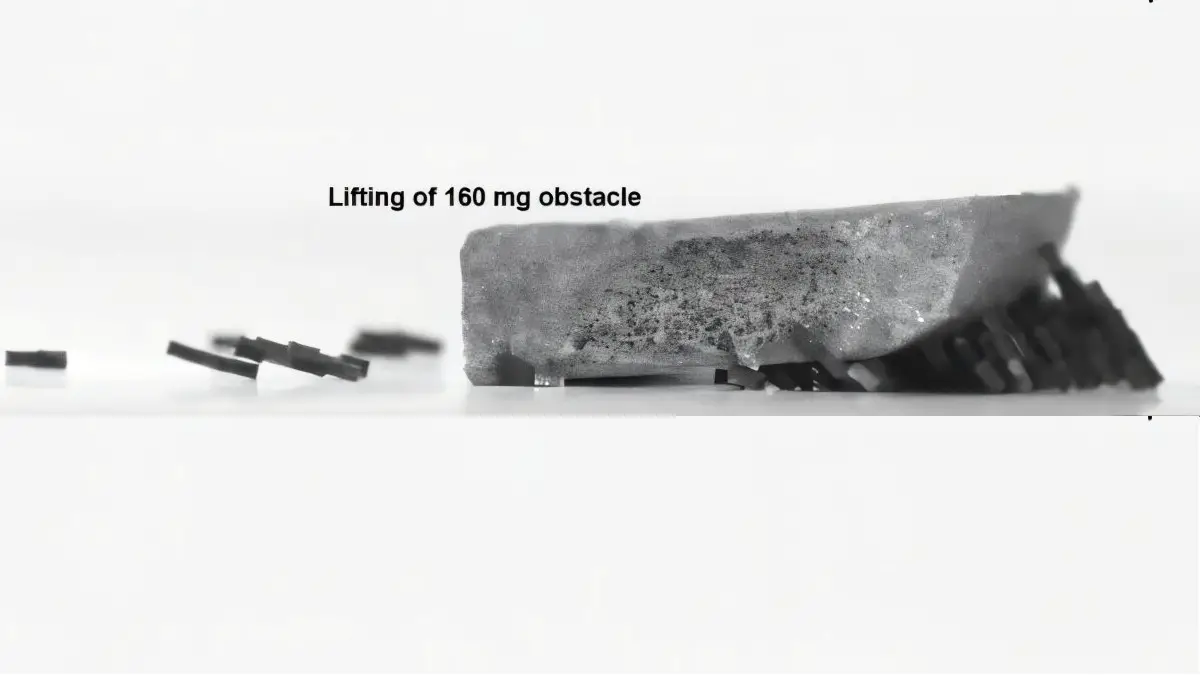
Les essaims de microrobots ont été testés pour leurs performances dans diverses configurations d’assemblage. Ils ont démontré la capacité de surmonter des obstacles cinq fois plus hauts que leur taille individuelle et de se lancer collectivement par-dessus ces barrières. De plus, un essaim de 1000 microrobots a formé un radeau flottant sur l’eau, enveloppant une pilule pesant 2000 fois plus qu’un robot individuel, permettant ainsi le transport du médicament à travers le liquide.
Sur terre ferme, un essaim a transporté un chargement 350 fois plus lourd que chaque microrobot. Ils ont également réussi à déboucher des tubes imitant des vaisseaux sanguins obstrués, montrant potentiellement leur utilité dans des applications médicales comme le traitement de thromboses.
L’étude de Jeong Jae Wie et ses collègues a révélé des aspects fascinants de la robotique en essaim. «Les chercheurs ont été surpris par l’adaptabilité élevée des essaims de microrobots à leur environnement et par leur niveau élevé d’autonomie dans le contrôle de l’essaim,» a-t-il déclaré. Cette recherche met en lumière comment les essaims peuvent non seulement exécuter des tâches mais aussi s’adapter dynamiquement aux conditions changeantes.
Les essaims de robots cubiques, plutôt que sphériques, offrent des avantages par rapport aux contacts point à point grâce à des surfaces de contact plus larges, augmentant ainsi la force d’attraction magnétique entre eux. Chaque microrobot, avec une hauteur de 600 micromètres, est composé d’un corps en époxy intégrant des particules de NdFeB, permettant une réaction aux champs magnétiques.
Malgré leurs prouesses, les microrobots actuels nécessitent encore un contrôle magnétique externe, limitant leur autonomie dans des espaces complexes comme les artères humaines. Wie souligne que «les essaims de microrobots magnétiques requièrent un contrôle magnétique externe et manquent de la capacité de naviguer de manière autonome dans des espaces confinés ou complexes comme de véritables artères.» L’avenir de ces recherches se concentrera sur l’amélioration de l’autonomie, avec pour objectif un contrôle en temps réel des mouvements et des trajectoires.
Légende illustration : Robots se déplaçant en soulevant et en guidant des objets. Crédit : Device/Yang et Won et al.
Article : Magnetic Swarm Intelligence of Mass-Produced Programmable Microrobot Assemblies for Versatile Task Execution, Device (2024). DOI: 10.1016/j.device.2024.100626.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.