La dextérité et la sensibilité du toucher humain continuent de fasciner et de défier les chercheurs en robotique. Une équipe de l’Université de Californie à San Diego (UCSD) semble avoir trouvé une solution permettant aux mains robotiques de manipuler divers objets uniquement grâce au sens du toucher, sans nécessiter de vision.
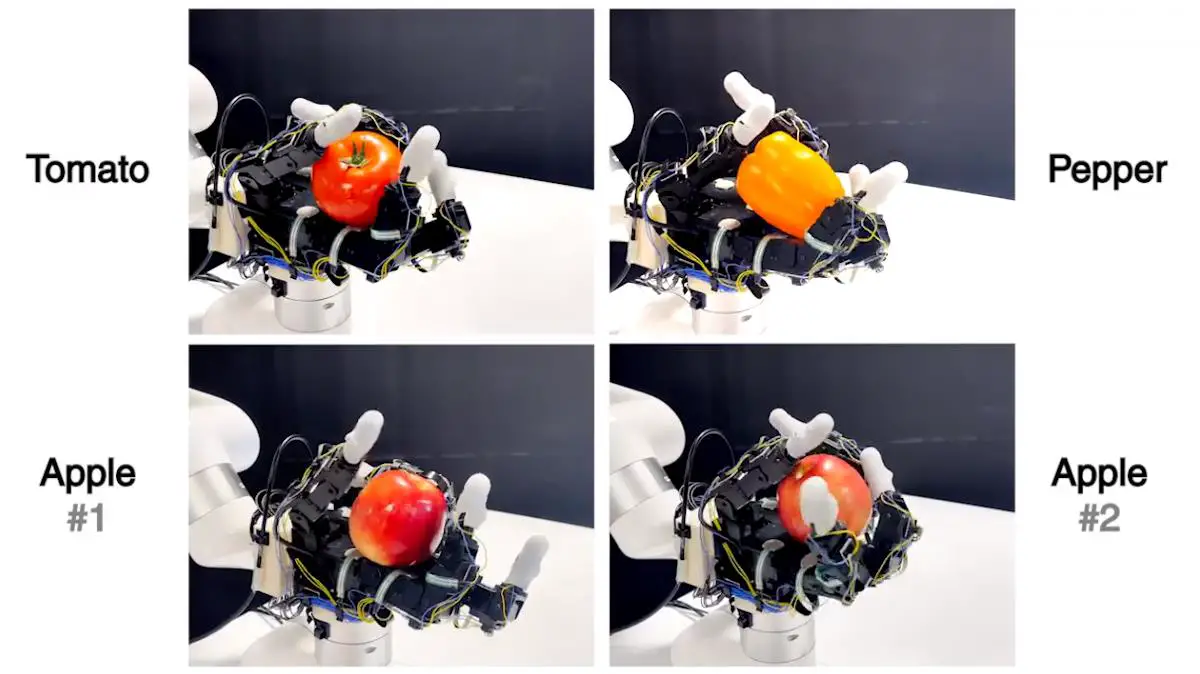
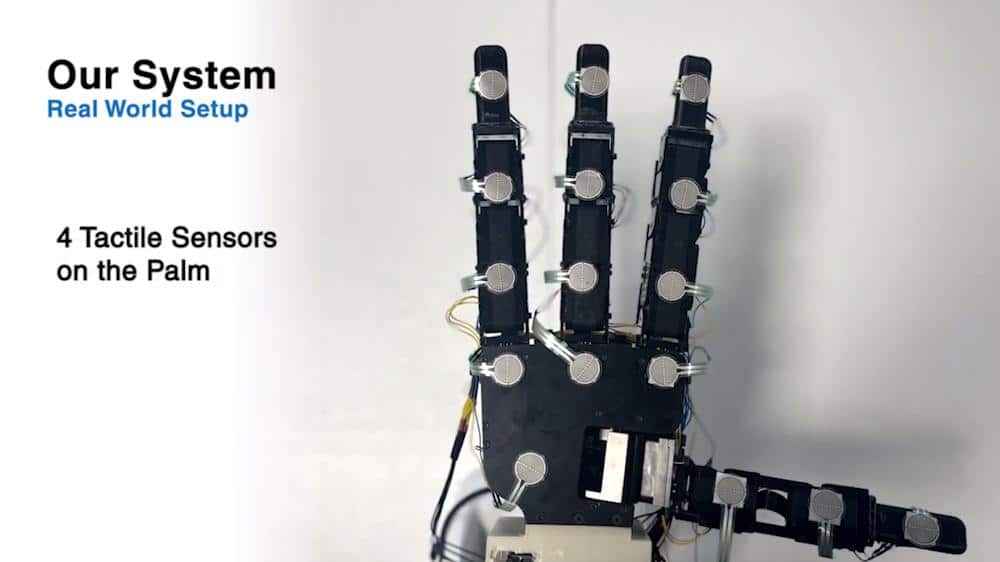
Les chercheurs ont équipé une main robotique de quatre doigts avec 16 capteurs tactiles, dont chaque unité est estimée à environ 12 dollars. Leur fonction est simple : déterminer si un objet est en contact avec eux ou non. La main robotique, dotée de cette capacité tactile, a ainsi réussi à manipuler et à tourner une variété d’objets allant des jouets aux légumes, sans les endommager.
Contrairement à d’autres techniques qui s’appuient sur quelques capteurs tactiles coûteux et à haute résolution, cette approche utilise de nombreux capteurs à faible coût et à faible résolution qui émettent des signaux binaires simples – contact ou non – pour réaliser une rotation d’objets. Ces capteurs sont répartis sur une large surface de la main robotique.
Les défis des techniques actuelles
« Les systèmes qui reposent sur un petit nombre de capteurs limitent la capacité de détection du système, car ils ont moins de chances d’entrer en contact avec l’objet. De plus, les capteurs tactiles à haute résolution, qui fournissent des informations sur la texture, sont extrêmement difficiles à simuler et coûteux. Cela rend leur utilisation plus difficile dans les expériences réelles. Enfin, nombre de ces techniques continuent de dépendre de la vision. » a déclaré Xiaolong Wang, professeur de génie électrique et informatique à l’UCSD et responsable de l’étude.
Les chercheurs de l’UCSD ont adopté une solution plus simple. « Nous démontrons que nous n’avons pas besoin de détails sur la texture d’un objet pour accomplir cette tâche. Nous avons juste besoin de signaux binaires simples indiquant si les capteurs ont touché l’objet ou non, et ceux-ci sont beaucoup plus faciles à simuler et à transférer dans le monde réel. » a précisé le professeur Wang.
En outre, la grande couverture des capteurs tactiles binaires fournit à la main robotique suffisamment d’informations sur la structure 3D de l’objet et son orientation pour réussir à le faire pivoter sans avoir recours à la vision.
Un entraînement par simulation puis un test grandeur nature
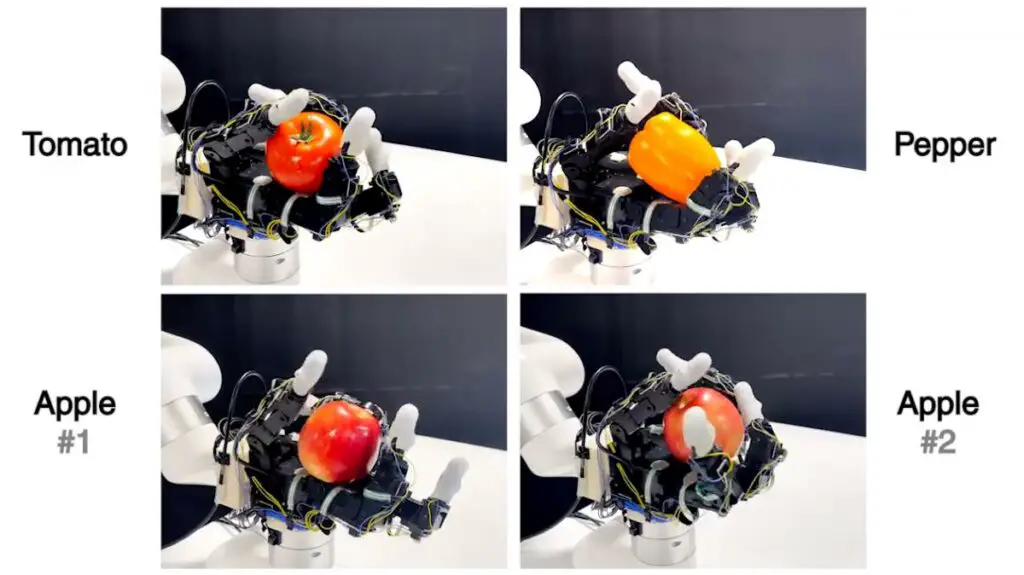
Le système a été d’abord entraîné à l’aide de simulations d’une main robotique virtuelle manipulant un ensemble diversifié d’objets, y compris ceux de formes irrégulières. Le système a ensuite été testé sur une véritable main robotique avec des objets qu’il n’avait pas encore rencontrés. La main robotique a réussi à faire pivoter une variété d’objets sans à-coup et sans les lâcher. Cependant, les objets aux formes plus complexes ont nécessité plus de temps pour être manipulés.
« La manipulation manuelle est une compétence très courante chez les humains, mais elle est très complexe à maîtriser pour les robots« , a déclaré M. Wang. « Si nous parvenons à doter les robots de cette compétence, cela ouvrira la voie aux types de tâches qu’ils peuvent accomplir.«
L’équipe du Professeur Wang travaille actuellement sur l’extension de cette approche à des tâches de manipulation plus complexes. Ils développent des techniques pour permettre aux mains robotiques d’attraper, de lancer et de jongler, par exemple.
En synthèse
La mise au point de cette technique innovante par les chercheurs de l’UCSD marque un grand pas vers une manipulation plus fine et délicate des objets par les robots. En se concentrant sur l’utilisation de capteurs tactiles à faible coût et en élargissant leur couverture sur la main robotique, cette approche a réussi à démontrer que la texture des objets n’est pas nécessaire pour une manipulation réussie, mais plutôt la capacité à détecter le contact.
Titre de l’article : « Rotation sans vision : Towards In-hand Dexterity through Touch« . Les co-auteurs sont Binghao Huang, Yuzhe Qin, UC San Diego ; et Zhao-Heng Yin et Qifeng Chen, HKUST.