Dans une époque où la robotique douce prend de l’ampleur, des chercheurs de l’Université d’État de Caroline du Nord ont créé un robot doux inspiré du déplacement d’une chenille. Cette innovation pourrait marquer un tournant dans la façon dont nous concevons la mobilité et la flexibilité des robots.
Un robot chenille aux mouvements précis
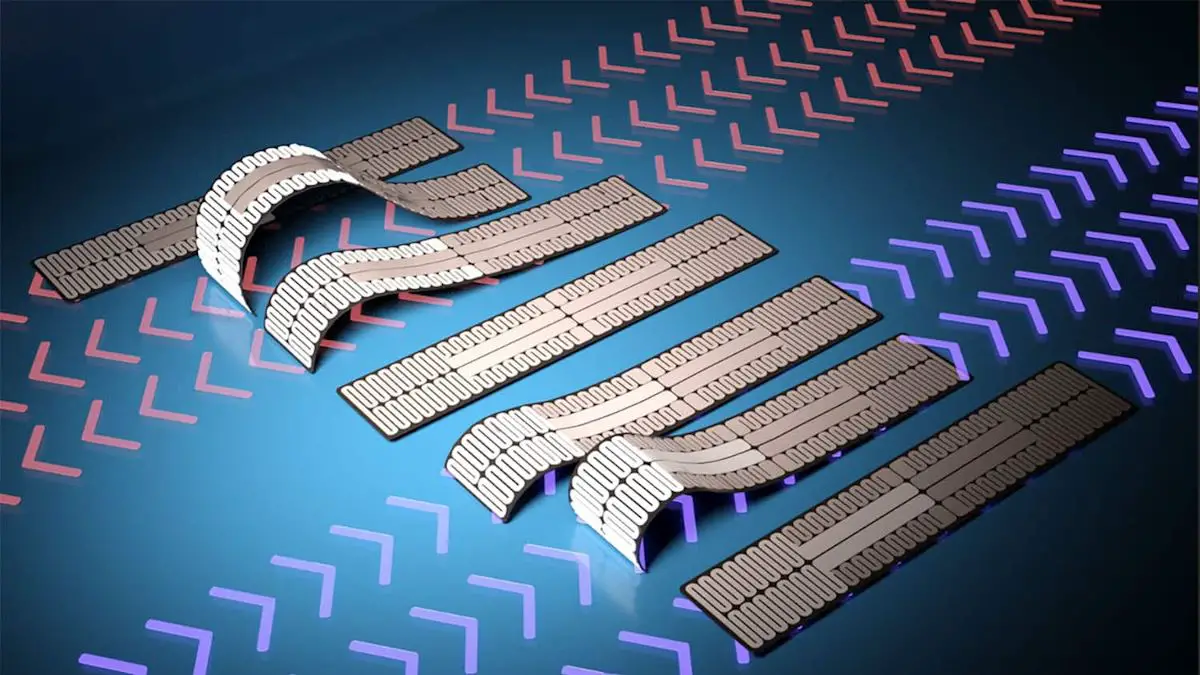
Imitant la manière dont une chenille bouge en contrôlant la courbure locale de son corps, ce « caterpillar-bot » est une réalisation exceptionnelle dans le domaine de la robotique douce. L’utilisation de nanofils d’argent pour réguler la chaleur et ainsi diriger les mouvements du robot est au cœur de cette innovation.
Yong Zhu, professeur éminent en génie mécanique et aérospatial à l’Université d’État de Caroline du Nord et auteur principal de cette recherche, précise : « Nous nous sommes inspirés de la biomécanique de la chenille pour imiter cette courbure locale, et utilisons des chauffages nanofils pour contrôler de manière similaire la courbure et le mouvement du caterpillar-bot. »
Complexité et avantage des nanofils
La structure du robot est composée de deux couches de polymère qui réagissent différemment à la chaleur. La couche inférieure se contracte à l’exposition à la chaleur, tandis que la couche supérieure se dilate. Des nanofils d’argent sont intégrés dans cette couche en expansion, permettant une précision remarquable dans le contrôle des mouvements.
Shuang Wu, auteur principal de l’étude et chercheur post-doctoral à l’Université d’État de Caroline du Nord, explique : « En général, plus le courant appliqué était élevé, plus il se déplaçait rapidement dans les deux directions. Cependant, nous avons découvert qu’il existait un cycle optimal permettant au polymère de refroidir, donnant ainsi du temps au ‘muscle’ pour se détendre avant une nouvelle contraction.
Potentiels d’application
Ce robot chenille n’est pas seulement capable de se déplacer en avant et en arrière. Il peut également être dirigé pour passer sous de très faibles espaces, évoquant la possibilité de le guider pour glisser sous une porte, par exemple. Cette précision dans la manœuvrabilité et la flexibilité ouvre la porte à une multitude d’applications potentielles, notamment dans des domaines tels que les opérations de recherche et de sauvetage.
En synthèse
Le « caterpillar-bot » est une prouesse technologique qui fusionne la robotique douce avec la biomécanique d’une chenille, offrant une mobilité et une flexibilité sans précédent. Grâce aux nanofils d’argent et à leur capacité de contrôle thermique, les chercheurs ont pu créer un robot avec une gamme de mouvements précis et une grande adaptabilité à son environnement.
Pour une meilleure compréhension
Qu’est-ce que le « caterpillar-bot » ?
Il s’agit d’un robot doux inspiré du mouvement des chenilles, capable de se déplacer en avant et en arrière et de passer sous de très faibles espaces.
Quelle technologie est utilisée pour contrôler ses mouvements ?
Le mouvement est contrôlé par une série de nanofils d’argent qui régulent la chaleur, permettant ainsi au robot de se déplacer et de se courber.
Quelles sont les applications potentielles de ce robot ?
Les domaines d’application sont vastes, allant des opérations de recherche et de sauvetage à d’autres où la flexibilité et la manœuvrabilité sont essentielles.
L’article, intitulé « Caterpillar-Inspired Soft Crawling Robot with Distributed Programmable Thermal Actuation« , est publié dans la revue à accès libre Science Advances. L’article a été cosigné par Jie Yin, professeur agrégé de génie mécanique et aérospatial à NC State, Yaoye Hong, étudiante en doctorat à NC State, et Yao Zhao, chercheur postdoctoral à NC State.
Auteurs : Shuang Wu, Yaoye Hong, Yao Zhao, Jie Yin and Yong Zhu, North Carolina State University / Published: March 22, Science Advances / DOI: 10.1126/sciadv.adf8014
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.