Jennifer Chu
Nos muscles sont les actionneurs de la nature. Ce tissu fibreux génère les forces qui font bouger notre corps. Ces dernières années, les ingénieurs ont utilisé du vrai tissu musculaire pour actionner des « robots biohybrides » composés à la fois de tissu vivant et de parties synthétiques. En associant des muscles cultivés en laboratoire à des squelettes synthétiques, les chercheurs conçoivent tout un bestiaire de robots musclés : rampants, marcheurs, nageurs et préhenseurs.
Mais pour la plupart, ces conceptions sont limitées en termes d’amplitude de mouvement et de puissance qu’elles peuvent produire. Aujourd’hui, les ingénieurs du MIT visent à donner un coup de boost aux bio-robots avec des tendons artificiels.
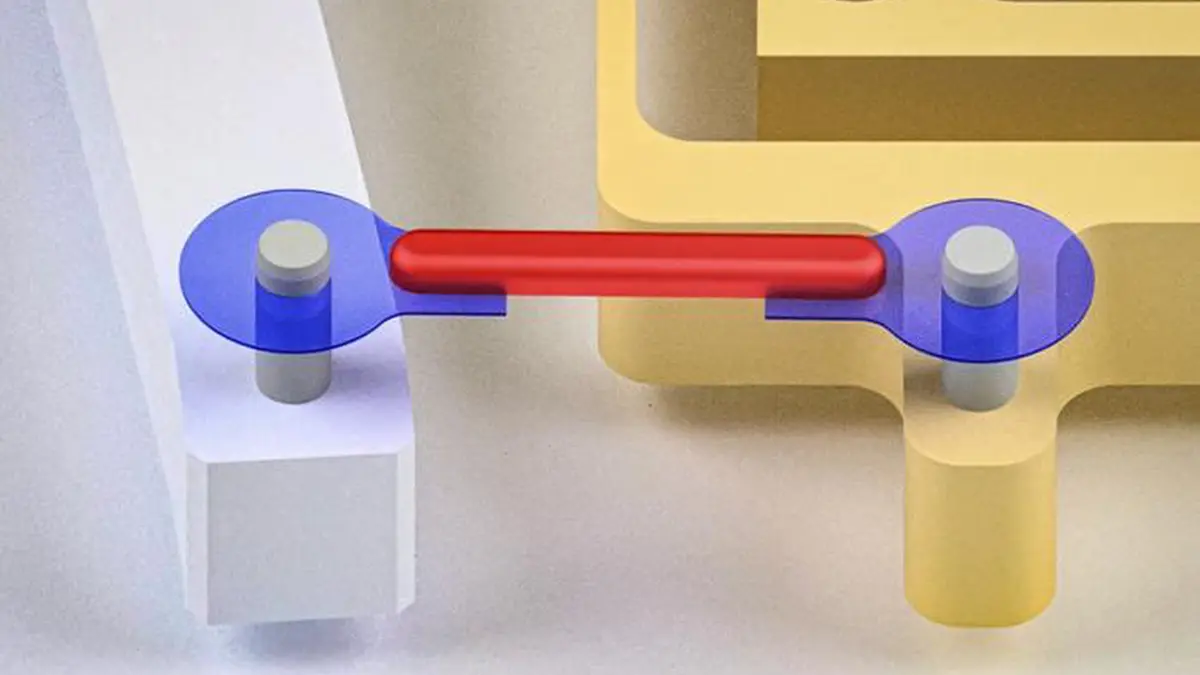
Les chercheurs ont développé des tendons artificiels à base d’hydrogel robuste et flexible. Ils ont attaché ces tendons, semblables à des élastiques, à chaque extrémité d’un petit morceau de muscle cultivé en laboratoire, formant une « unité muscle-tendon ». Puis ils ont relié les extrémités de chaque tendon artificiel aux doigts d’un préhenseur robotique.
Lorsqu’ils ont stimulé la contraction du muscle central, les tendons ont rapproché les doigts du préhenseur. Le robot a serré ses doigts trois fois plus vite, et avec une force 30 fois supérieure, par rapport à la même conception sans tendons de liaison.
Les chercheurs envisagent que cette nouvelle unité muscle-tendon puisse s’adapter à une large gamme de conceptions de robots biohybrides, un peu comme un élément d’ingénierie universel.
« Nous introduisons des tendons artificiels comme connecteurs interchangeables entre les actionneurs musculaires et les squelettes robotiques, explique l’auteure principale Ritu Raman, professeure adjointe en génie mécanique (MechE) au MIT. Une telle modularité pourrait faciliter la conception d’une large gamme d’applications robotiques, des outils chirurgicaux à l’échelle microscopique aux machines exploratrices autonomes et adaptatives. »
Les gains du muscle
Raman et ses collègues du MIT sont à l’avant-garde de la robotique biohybride, un domaine relativement nouveau apparu au cours de la dernière décennie. Ils se concentrent sur la combinaison de parties robotiques synthétiques et structurelles avec du tissu musculaire vivant comme actionneur naturel.
« La plupart des actionneurs avec lesquels les ingénieurs travaillent habituellement sont très difficiles à miniaturiser, souligne Raman. Au-delà d’une certaine taille, les lois physiques de base ne fonctionnent plus. L’avantage du muscle, c’est que chaque cellule est un actionneur indépendant qui génère de la force et produit du mouvement. On pourrait donc, en principe, fabriquer des robots vraiment petits. »
Les actionneurs musculaires présentent également d’autres avantages, que l’équipe de Raman a déjà démontrés : le tissu peut se renforcer avec l’exercice et guérir naturellement en cas de blessure. Pour ces raisons, Raman et d’autres imaginent que des droïdes musclés pourraient un jour être envoyés explorer des environnements trop éloignés ou dangereux pour l’homme. Ces robots musculeux pourraient développer leur force pour des traversées imprévues ou s’auto-réparer en l’absence d’aide. Les robots biohybrides pourraient également servir d’assistants chirurgicaux miniatures, réalisant des procédures délicates à l’échelle microscopique à l’intérieur du corps.
Tous ces scénarios futurs motivent Raman et d’autres à trouver des moyens d’associer des muscles vivants à des squelettes synthétiques. Les conceptions à ce jour consistaient à faire pousser une bande de muscle et à attacher chaque extrémité à un squelette synthétique, un peu comme enrouler un élastique autour de deux poteaux. Lorsque le muscle est stimulé pour se contracter, il peut rapprocher les parties d’un squelette pour générer un mouvement souhaité.
Mais Raman précise que cette méthode gaspille beaucoup de muscle, utilisé pour attacher le tissu au squelette plutôt que pour le faire bouger. Et cette connexion n’est pas toujours sûre. Le muscle est assez mou par rapport aux structures squelettiques, et cette différence peut provoquer sa déchirure ou son détachement. De plus, souvent, seules les contractions de la partie centrale du muscle finissent par effectuer un travail – une quantité relativement faible qui génère peu de force.
« Nous nous sommes demandé : comment arrêter de gaspiller du matériau musculaire, le rendre plus modulaire pour qu’il puisse s’attacher à n’importe quoi, et le faire travailler plus efficacement ? s’interroge Raman. La solution trouvée par le corps est d’avoir des tendons dont la rigidité est à mi-chemin entre celle du muscle et celle de l’os, ce qui permet de combler cette inadéquation mécanique entre le muscle mou et le squelette rigide. Ce sont comme des câbles fins qui s’enroulent efficacement autour des articulations. »
« Connecté intelligemment »
Dans leurs nouveaux travaux, Raman et ses collègues ont conçu des tendons artificiels pour connecter le tissu musculaire naturel à un squelette synthétique de préhenseur. Leur matériau de choix était l’hydrogel – un gel à base de polymère à la fois malléable et robuste. Raman a obtenu des échantillons d’hydrogel de son collègue et co-auteur Xuanhe Zhao, pionnier dans le développement des hydrogels au MIT. Le groupe de Zhao a mis au point des recettes pour des hydrogels de dureté et d’élasticité variables, capables d’adhérer à de nombreuses surfaces, y compris des matériaux synthétiques et biologiques.
Pour déterminer la dureté et l’élasticité que les tendons artificiels devaient avoir pour fonctionner dans leur conception de préhenseur, l’équipe de Raman a d’abord modélisé le design comme un simple système de trois types de ressorts, représentant respectivement le muscle central, les deux tendons de liaison et le squelette du préhenseur. Ils ont attribué une certaine rigidité au muscle et au squelette, déjà connue, et l’ont utilisée pour calculer la rigidité requise pour les tendons de liaison afin de déplacer le préhenseur d’une quantité souhaitée.
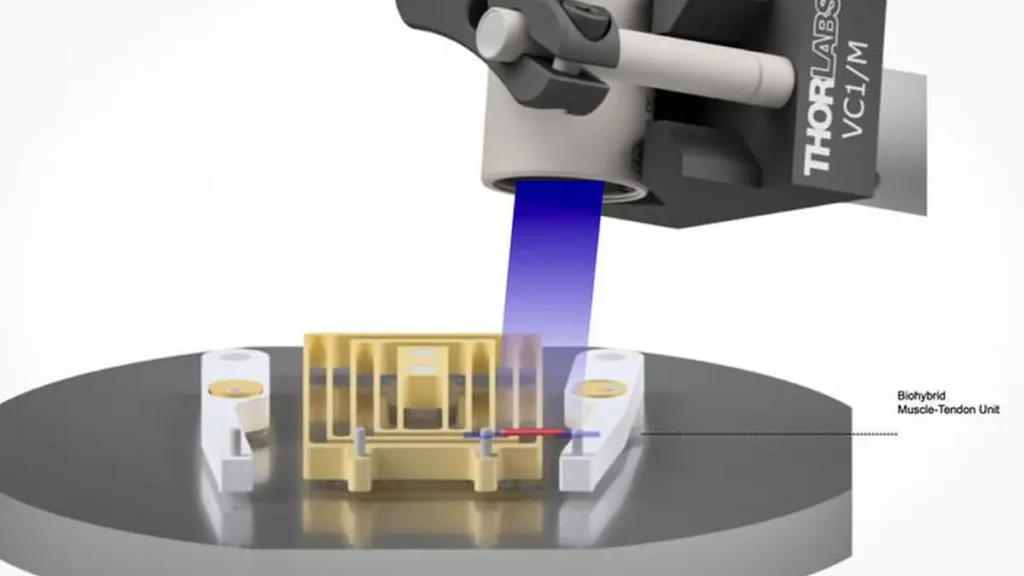
À partir de cette modélisation, l’équipe a dérivé une recette d’hydrogel d’une rigidité spécifique. Une fois le gel fabriqué, les chercheurs l’ont soigneusement gravé en câbles fins pour former les tendons artificiels. Ils ont attaché deux tendons à chaque extrémité d’un petit échantillon de tissu musculaire, qu’ils ont cultivé en utilisant des techniques standards de laboratoire. Ils ont ensuite enroulé chaque tendon autour d’un petit poteau à l’extrémité de chaque doigt du préhenseur robotique – un design de squelette développé par le professeur de MechE Martin Culpepper, expert en conception et fabrication de machines de précision.
Lorsque l’équipe a stimulé la contraction du muscle, les tendons ont à leur tour tiré sur le préhenseur pour pincer ses doigts. Au cours de multiples expériences, les chercheurs ont constaté que le préhenseur muscle-tendon fonctionnait trois fois plus vite et produisait 30 fois plus de force que lorsque le préhenseur était actionné uniquement par une bande de tissu musculaire (et sans tendons artificiels). La nouvelle conception à base de tendons a également pu maintenir cette performance sur 7 000 cycles, ou contractions musculaires.
Globalement, Raman a observé que l’ajout de tendons artificiels augmentait le rapport puissance/poids du robot par 11, ce qui signifie que le système nécessitait beaucoup moins de muscle pour effectuer le même travail.
« Il suffit d’un petit morceau d’actionneur qui est connecté intelligemment au squelette, affirme Raman. Normalement, si un muscle est très mou et attaché à quelque chose offrant une forte résistance, il se déchirera avant de déplacer quoi que ce soit. Mais si on l’attache à quelque chose comme un tendon qui peut résister à la déchirure, il peut vraiment transmettre sa force à travers le tendon, et il peut déplacer un squelette qu’il n’aurait pas pu bouger autrement. »
La nouvelle conception muscle-tendon de l’équipe fusionne avec succès la biologie et la robotique, estime l’ingénieure biomédicale Simone Schürle-Finke, professeure associée en sciences et technologies de la santé à l’ETH Zürich.
Grâce à ces nouveaux tendons artificiels, le groupe de Raman avance maintenant vers le développement d’autres éléments, comme des enveloppes protectrices semblables à de la peau, pour permettre aux robots musclés d’évoluer dans des environnements pratiques et réels.
Article : “Biohybrid tendons enhance the power-to-weight ratio and modularity of muscle-powered robots” – Journal : Advanced Science – DOI : 10.1002/advs.202512680
Les co-auteurs du MIT de l’étude incluent les étudiants diplômés Nicolas Castro, Maheera Bawa, Bastien Aymon, Sonika Kohli et Angel Bu ; l’étudiante de premier cycle Annika Marschner ; le post-doctorant Ronald Heisser ; les anciens élèves Sarah J. Wu ’19, SM ’21, PhD ’24 et Laura Rosado ’22, SM ’25 ; et les professeurs de MechE Martin Culpepper et Xuanhe Zhao.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.