Le développement de la robotique médicale soulève des questions sur la miniaturisation et la multifonctionnalité des dispositifs permettant des interventions chirurgicales moins invasives. Comment la technologie peut-elle s’adapter aux espaces étroits et complexes du corps humain tout en assurant des performances optimales ? Les chercheurs de l’Université des Sciences et Technologies de Hong Kong (HKUST) ont relevé ce défi avec une innovation prometteuse.
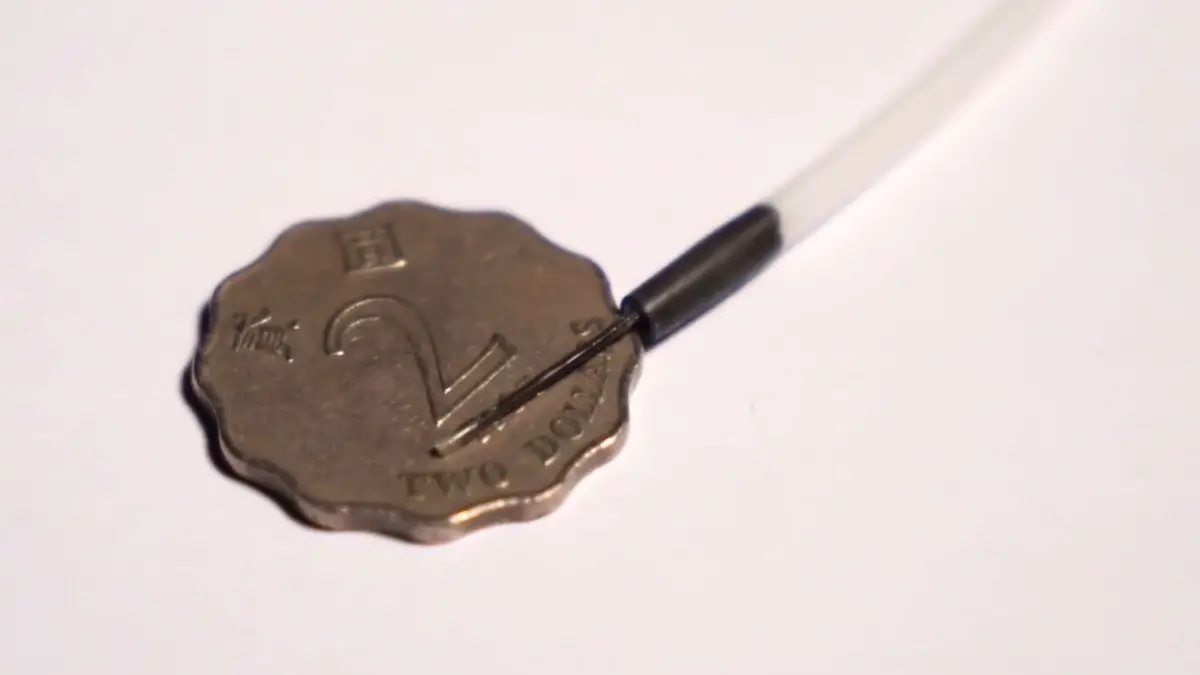
Des chercheurs de l’École d’ingénierie de l’Université des Sciences et Technologies de Hong Kong (HKUST) ont développé un robot biomédical multifonctionnel, le plus petit du monde. Ce robot, avec une dimension de seulement 0,95 mm, est 60 % plus petit que les modèles actuels. Il a été conçu pour offrir des capacités d’imagerie, de mouvement à haute précision et de multiples opérations, comme l’échantillonnage, l’administration de médicaments et l’ablation laser.
Fonctionnalités et performances
Ce robot présente une performance d’imagerie compétitive et améliore la détection des obstacles par un facteur dix, avec une distance de détection étendue jusqu’à environ 9,4 mm. De plus, il atteint une précision de mouvement remarquable, inférieure à 30 μm, et élargit la région d’imagerie d’environ 25 fois par rapport à la vue inhérente des systèmes précédents. Cette «trinité impossible» combine trois spécifications majeures dans un seul dispositif.
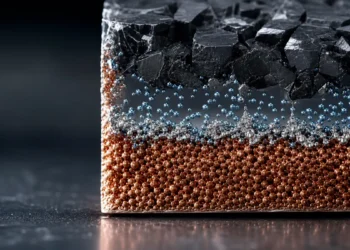
Le développement de ce robot a été mené par le professeur SHEN Yajing, associé professeur au Département de Génie Électronique et Informatique (ECE), et son équipe. Leur innovation repose sur quatre composants principaux : une matrice de fibres optiques pour capturer des images à l’intérieur du corps, un outil personnalisé pour administrer des traitements de manière précise, un squelette creux pour maintenir les fibres et les outils en place, et une peau fonctionnalisée permettant un contrôle précis des mouvements du robot.
Le squelette creux est fabriqué grâce à une imprimante 3D à l’échelle micro, tandis que la peau fonctionnalisée est produite par une technique de pulvérisation magnétique, ce qui contribue à la réduction de la taille du robot et facilite son déplacement pendant les interventions chirurgicales. Une couche externe de type gel réduit également la friction. Des tests ont été effectués sur des modèles bronchiques in vitro et sur des poumons porcins ex vivo, prouvant que le robot peut naviguer aisément dans des espaces restreints tout en capturant des images claires et en réalisant des traitements dans des zones difficiles d’accès.
Implications cliniques et futures recherches
Le professeur Shen a souligné le potentiel de ce robot pour les applications cliniques : «Les robots à continuum de petite échelle promettent pour le diagnostic et le traitement interventionnel, mais les modèles existants peinent souvent à combiner compacité, navigation précise et traitement fonctionnel visualisé. Notre étude offre une solution significative pour développer un robot chirurgical visant à atteindre des objectifs de diagnostic précoce et thérapeutique dans des zones difficiles du corps. Avec les avancées technologiques en cours, nous croyons que le robot à fibres fera de plus grandes contributions à la santé humaine dans un avenir proche.»
Grâce à leur capacité à naviguer dans des cavités étroites tout en permettant une récupération rapide et un risque d’infection faible, les robots à continuum ont été employés dans le traitement de plusieurs maladies, notamment pour la pose de stents et l’électrophysiologie cardiaque, ainsi que pour la réparation des perforations dans les ulcères gastriques et duodénaux via une laparoscopie à port unique.
L’équipe de recherche prévoit de continuer à affiner les caractéristiques du robot pour les adapter à des contextes pratiques. «Nous visons à optimiser encore le design et le contrôle du robot à fibres, en priorisant la sécurité et la fiabilité pendant les chirurgies interventionnelles. Nous attendons avec impatience d’effectuer des essais in vivo pour démontrer ses performances dans des scénarios cliniques,» a conclu le Dr. ZHANG Tieshan, chercheur postdoctoral à HKUST et co-auteur principal de l’étude avec le Dr. LI Gen.
Des chercheurs de l’école d’ingénierie de HKUST ont mis au point le plus petit robot biomédical multifonctionnel du monde, dont le profil fin ne mesure que 0,95 mm.
Article : « Sub-millimeter fiberscopic robot with integrated maneuvering, imaging, and biomedical operation abilities » – DOI : s41467-024-55199-6
Crédit images : HKUST