Les progrès dans le domaine de la vision artificielle continuent d’étonner. Une équipe de chercheurs de Hong Kong vient de mettre au point un œil composé artificiel qui pourrait transformer la vision des robots. Cette innovation s’inspire directement de la nature et s’ajoute à une série de découvertes récentes dans le domaine des systèmes de vision biomimétiques.
L’équipe de l’HKUST s’est inspirée du monde naturel pour concevoir ce nouveau dispositif. Les yeux composés des insectes présentent un intérêt particulier pour les chercheurs en raison de leur large champ de vision et de leur capacité à suivre les mouvements. Ces caractéristiques sont particulièrement recherchées pour les applications industrielles et les systèmes de vision robotique réactifs.
Cependant, l’intégration de systèmes d’yeux composés dans des plateformes autonomes comme les robots ou les drones a toujours été un défi. Ces systèmes sont souvent confrontés à des problèmes liés à la complexité, à la stabilité lors de la déformation, aux contraintes géométriques, ainsi qu’à de potentielles incompatibilités entre les composants optiques et les détecteurs.
Une approche novatrice
Pour surmonter ces obstacles, l’équipe de l’HKUST a développé une approche innovante. Comme l’explique le projet dans son article publié : «Les tentatives précédentes de transfert d’un réseau de microlentilles sur une surface courbe ont été confrontées à des complications pendant le processus de transfert.»
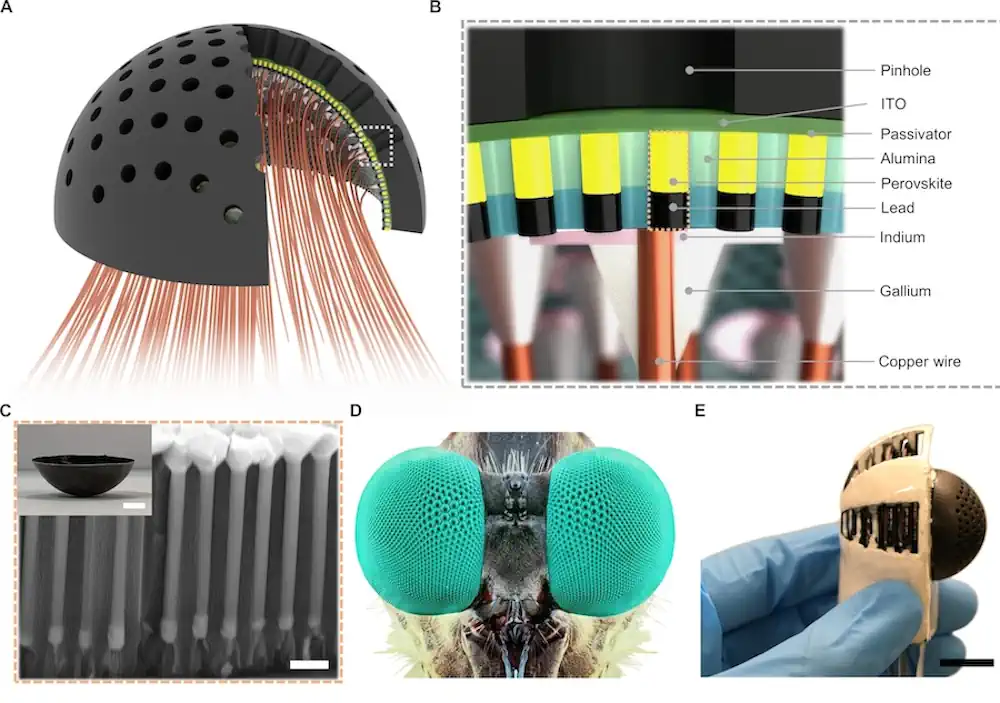
La solution proposée par l’HKUST consiste en un œil composé sans lentille. Ce dispositif combine une structure optique en nid d’abeille imprimée en 3D avec un réseau hémisphérique de photodétecteurs à nanofils de pérovskite à haute densité et à l’état solide.
Des performances impressionnantes
Dans cette conception, le capteur d’image hémisphérique peut présenter une haute densité de pixels pour élargir le champ d’imagerie. Parallèlement, le réseau de sténopés sans lentille imprimé en 3D peut avoir une disposition personnalisable pour réguler la lumière incidente et éliminer la zone aveugle entre les ommatidies voisines – les unités individuelles au sein de l’œil composé d’un insecte.
Les essais ont démontré que la combinaison d’une bonne sélectivité angulaire, d’un large champ de vision, d’une réponse spectrale étendue en configurations monoculaire et binoculaire, et d’une capacité de suivi dynamique du mouvement permettait à l’œil composé à sténopé non seulement de localiser précisément les cibles, mais aussi de suivre un robot quadrupède en mouvement en temps réel, après l’incorporation du capteur sur un drone.
Des applications prometteuses en robotique
Ce type d’exercice de suivi et de poursuite de cibles en mouvement indique que le nouvel œil composé pourrait être particulièrement précieux pour les systèmes de vision robotique avancés, selon l’HKUST. Si l’équipe parvient à miniaturiser davantage la taille du dispositif et à augmenter le nombre d’ommatidies, une résolution d’imagerie et une vitesse de réponse améliorées pourraient alors être exploitées dans de nombreux scénarios de vision robotique.
Zhiyong Fan, de l’HKUST, commente : «Cette conception d’œil composé est simple, légère et peu coûteuse. Bien qu’elle ne remplacera pas entièrement les caméras traditionnelles, elle pourrait constituer un atout majeur dans certaines applications robotiques, comme dans un essaim de drones volant en formation serrée.»
Article : « An ultrawide field-of-view pinhole compound eye using hemispherical nanowire array for robot vision »- DOI : 10.1126/scirobotics.adi8666