
Si les robots peinent à égaler l’aisance humaine dans la manipulation d’objets en milieux complexes, une équipe de chercheurs propose une réponse innovante : PolyTouch, un doigt artificiel intégrant trois modalités sensorielles — tactile, acoustique et visuelle périphérique — pour une perception environnementale enrichie. Ce dispositif, décrit dans une étude récente, illustre comment l’association de capteurs hétérogènes et d’algorithmes d’intelligence artificielle pourrait transformer les capacités des machines, en leur permettant d’interagir avec une précision et une adaptabilité inédites.
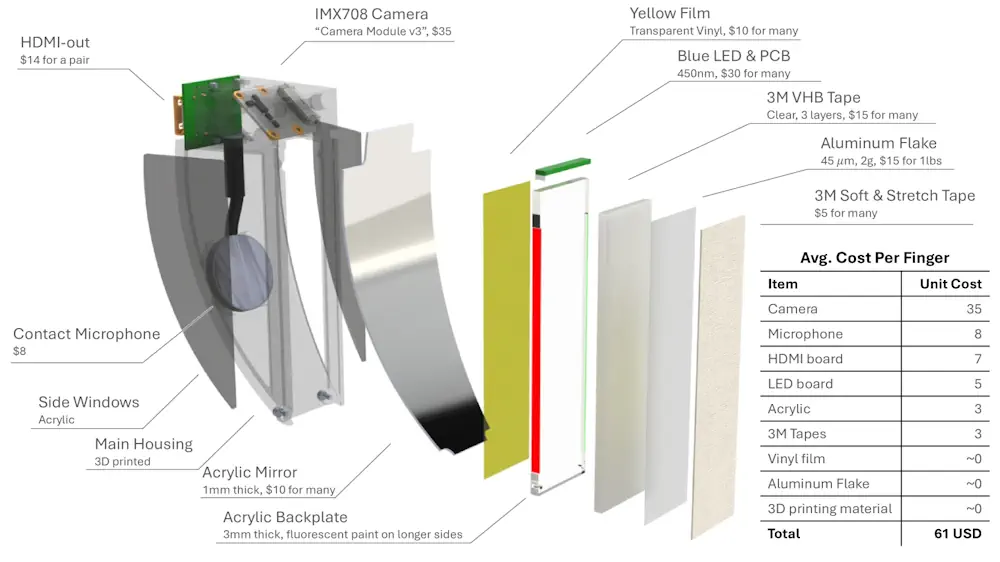
Le cœur de PolyTouch réside dans sa conception multi-capteurs. La détection tactile repose sur une caméra miniature haute résolution, logée à l’intérieur du doigt, capturant les déformations d’un élastomère transparent au contact d’un objet. Ce matériau, éclairé par des LEDs et des pigments fluorescents, génère des motifs lumineux analysables par la caméra, révélant textures et reliefs avec une finesse remarquable. Deux options d’élastomères sont explorées : un ruban adhésif industriel (VHB 3M) recouvert d’aluminium pour sa simplicité de fabrication, et un caoutchouc silicone (XP-565) optimisé pour sa réactivité.
Outre ses capteurs tactiles, PolyTouch intègre un microphone piézoélectrique, échantillonné à 48 kHz, captant les vibrations générées lors des interactions. Ces signaux acoustiques, imperceptibles à l’oreille humaine, trahissent des propriétés comme la dureté d’un matériau ou le glissement d’un objet, renforçant la capacité du robot à ajuster sa force en temps réel.
Complétant ces dispositifs, une vision périphérique est obtenue grâce à des fenêtres latérales et un miroir stratégiquement placés, étendant le champ visuel de la caméra interne. Cette fonction permet d’anticiper les obstacles environnants et d’améliorer la planification des mouvements, un atout dans des espaces encombrés.
L’algorithme, un orchestrateur des sens
La fusion des données s’appuie sur un modèle de « politique de diffusion tactile », combinant des réseaux neuronaux spécialisés — T3 pour le tactile, CLIP pour la vision, AST pour l’audio — via un mécanisme d’attention croisée. Cette architecture apprend dynamiquement à pondérer chaque modalité selon la tâche, optimisant la prise de décision. Par exemple, lors du tri de fruits visuellement similaires, les informations tactiles et acoustiques prennent le pas sur la vision, tandis que la manipulation d’objets fragiles privilégie les retours de force.
Les tests expérimentaux soulignent l’efficacité du système. Dans un scénario de tri de mûres et de myrtilles — dont la distinction visuelle est délicate —, PolyTouch atteint 80 % de succès, contre 20 % pour les méthodes traditionnelles. Lors de manipulations délicates, comme l’insertion d’une clé ou le déplacement d’un œuf à la spatule, le dispositif évite systématiquement les erreurs de force (excès ou insuffisance) fréquentes chez les robots standard. En moyenne, l’approche multi-capteurs améliore de 19 % la progression des tâches et de 34 % leur taux de réussite global.
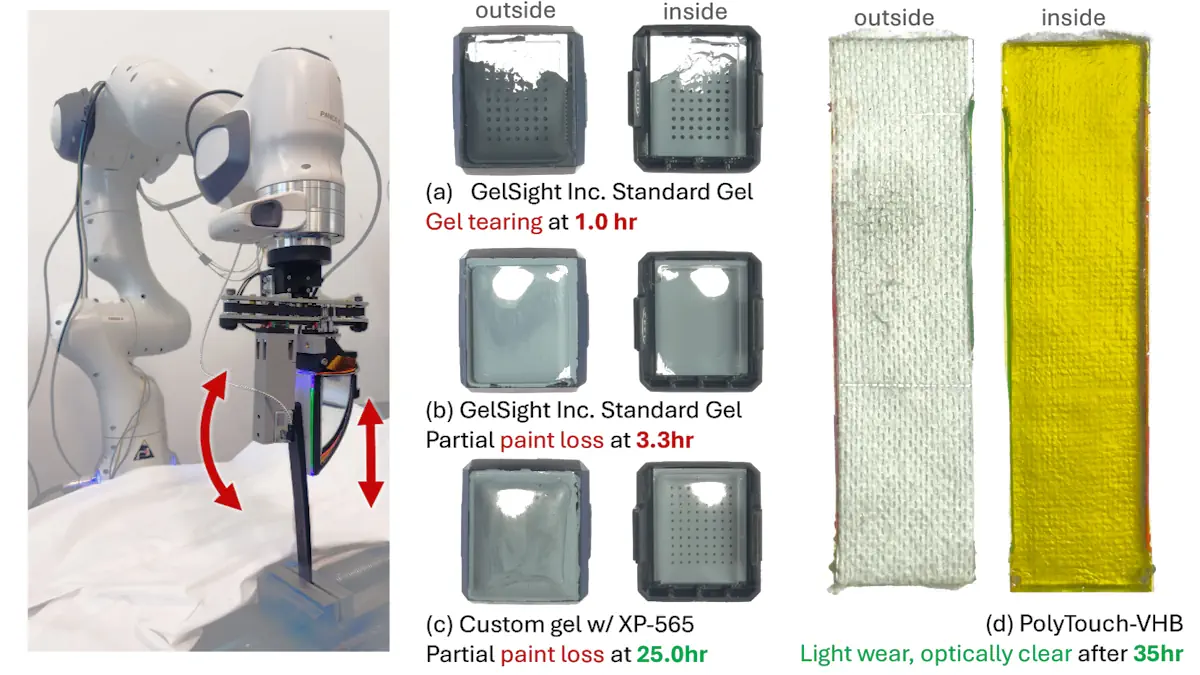
Néanmoins, des défis subsistent. L’utilisation du ruban VHB, bien que pratique, introduit un phénomène d’hystérésis — un retard dans la réponse du matériau — dû à sa viscosité. Les chercheurs proposent d’atténuer ce biais par un traitement logiciel des séquences temporelles et une corrélation avec les données de vision périphérique. Des matériaux alternatifs, moins visqueux mais tout aussi simples à intégrer, sont également à l’étude.
En route vers une robotique sensible et adaptable
Au-delà des chiffres, PolyTouch représente une philosophie : la dextérité robotique ne se limite pas à l’imitation des mouvements humains, mais exige une compréhension multisensorielle du monde. En dotant les machines de la capacité à « sentir », « écouter » et « observer » simultanément, cette technologie ouvre des perspectives pour des applications domestiques ou industrielles, où les robots doivent naviguer dans des environnements imprévisibles.
Reste à savoir si cette approche marquera un tournant dans le domaine. Les chercheurs, en tout cas, voient en PolyTouch un pas vers des systèmes capables de percevoir avec une subtilité proche de l’humain — non pas en reproduisant nos sens, mais en exploitant des synergies technologiques inédites. Une invitation à repenser ce que « comprendre » signifie pour une machine.
Légende illustration : Essai de durabilité de l’élastomère dans un environnement simulant l’utilisation d’un outil. Un robot Franka Panda effectue un frottement continu sur le manche d’une spatule flexible fixe. Un GelSight Mini fabriqué par GelSight Inc. et un PolyTouch-VHB sont montés l’un en face de l’autre.
Article : « PolyTouch: A Robust Multi-Modal Tactile Sensor for Contact-rich Manipulation Using Tactile-Diffusion Policies » – DOI : 2504.19341

















