Franziska Schmid
Des chercheurs de l’ETH Zurich ont mis au point un microrobot capable de transporter des médicaments vers des endroits précis dans l’organisme, qui pourrait être utilisé dans les hôpitaux dans un avenir proche.
Chaque année, 12 millions de personnes dans le monde sont victimes d’un accident vasculaire cérébral ; beaucoup en meurent ou souffrent de séquelles permanentes. Actuellement, on administre des médicaments pour dissoudre le thrombus qui bloque le vaisseau sanguin. Ces médicaments se répandent dans tout l’organisme, ce qui signifie qu’il faut administrer une dose élevée pour garantir que la quantité nécessaire atteigne le thrombus. Cela peut entraîner des effets secondaires graves, tels que des hémorragies internes. Comme les médicaments ne sont souvent nécessaires que dans certaines zones spécifiques du corps, la recherche médicale cherche depuis longtemps un moyen d’utiliser des microrobots pour acheminer les produits pharmaceutiques là où ils doivent agir : dans le cas d’un AVC, directement vers le thrombus responsable de l’AVC. Aujourd’hui, une équipe de chercheurs de l’ETH Zurich a réalisé des avancées majeures à plusieurs niveaux. Ils ont publié leurs conclusions dans la revue Science.
Des nanoparticules de précision sont nécessaires
Le microrobot utilisé par les chercheurs comprend une capsule sphérique exclusive composée d’une enveloppe en gel soluble qu’ils peuvent contrôler à l’aide d’aimants et guider à travers le corps jusqu’à sa destination. Les nanoparticules d’oxyde de fer contenues dans la capsule lui confèrent ses propriétés magnétiques. « Les vaisseaux du cerveau humain étant très petits, la taille de la capsule est limitée. Le défi technique consiste à s’assurer qu’une capsule aussi petite possède également des propriétés magnétiques suffisantes », explique Fabian Landers, auteur principal de l’article et chercheur postdoctoral au Multi-Scale Robotics Lab de l’ETH Zurich.
Le microrobot a également besoin d’un agent de contraste pour permettre aux médecins de suivre son déplacement dans les vaisseaux à l’aide de rayons X. Les chercheurs se sont intéressés aux nanoparticules de tantale, couramment utilisées en médecine, mais plus difficiles à contrôler en raison de leur densité et de leur poids plus élevés. « Combiner fonctionnalité magnétique, visibilité à l’imagerie et contrôle précis dans un seul microrobot a nécessité une synergie parfaite entre la science des matériaux et l’ingénierie robotique, ce qui nous a pris de nombreuses années pour y parvenir », explique le professeur Bradley Nelson de l’ETH, qui mène des recherches sur les microrobots depuis des décennies. Le professeur Salvador Pané, chimiste à l’Institut de robotique et de systèmes intelligents, et son équipe ont mis au point des nanoparticules d’oxyde de fer de précision qui permettent cet équilibre délicat.
Un cathéter spécial libère une capsule chargée de médicaments
Les microrobots contiennent également le principe actif qu’ils doivent administrer. Les chercheurs ont réussi à charger les microrobots avec des médicaments courants destinés à diverses applications, en l’occurrence un agent thrombolytique, un antibiotique ou un médicament anticancéreux. Ces médicaments ont été libérés par un champ magnétique à haute fréquence qui chauffe les nanoparticules magnétiques, dissolvant ainsi l’enveloppe de gel et le microrobot.
Les chercheurs ont utilisé une stratégie en deux étapes pour rapprocher le microrobot de sa cible : ils ont d’abord injecté le microrobot dans le sang ou le liquide céphalo-rachidien à l’aide d’un cathéter. Ils ont ensuite utilisé un système de navigation électromagnétique pour guider le microrobot magnétique vers l’emplacement cible. La conception du cathéter est basée sur un modèle disponible dans le commerce, avec un fil-guide interne relié à une pince en polymère flexible. Lorsqu’il est poussé au-delà du guide externe, le préhenseur en polymère s’ouvre et libère le microrobot.
Nager à contre-courant – naviguer dans les vaisseaux sanguins
Afin de diriger les microrobots avec précision, les chercheurs ont mis au point un système de navigation électromagnétique modulaire adapté à une utilisation en salle d’opération. « La vitesse du flux sanguin dans le système artériel humain varie considérablement en fonction de l’emplacement. Cela rend la navigation d’un microrobot très complexe », ajoute Bradley Nelson. Les chercheurs ont combiné trois stratégies de navigation magnétique différentes qui leur ont permis de naviguer dans toutes les régions des artères de la tête.
Cela leur permet de faire rouler la capsule le long de la paroi du vaisseau à l’aide d’un champ magnétique rotatif. La capsule peut être guidée vers sa cible avec une précision extrême à une vitesse de 4 millimètres par seconde.
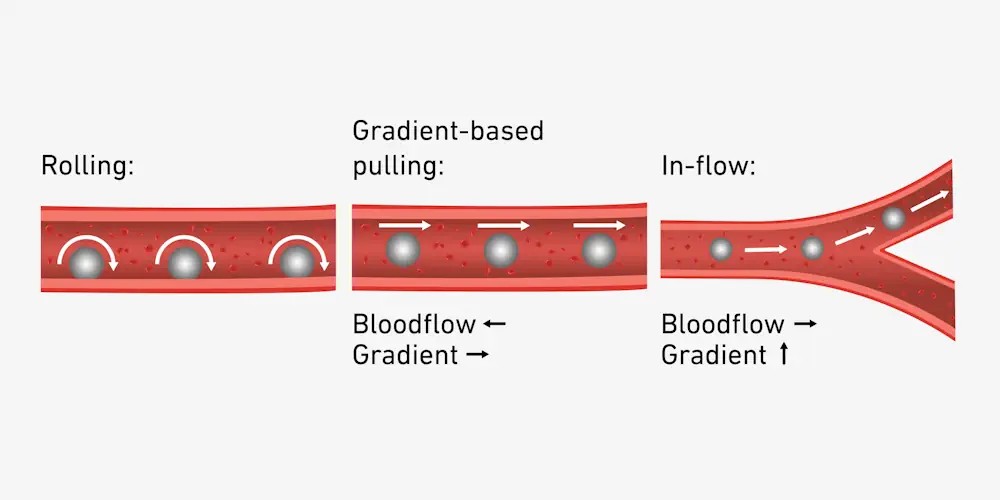
Dans un autre modèle, la capsule est déplacée à l’aide d’un gradient de champ magnétique : le champ magnétique est plus fort à un endroit qu’à un autre. Cela attire le microrobot dans le vaisseau vers le champ le plus fort. La capsule peut même aller à contre-courant, et ce à une vitesse de circulation considérable de plus de 20 centimètres par seconde. « Il est remarquable de voir à quel point le sang circule dans nos vaisseaux et à une vitesse aussi élevée. Notre système de navigation doit être capable de résister à tout cela », indique M. Landers.
Lorsque le microrobot atteint une jonction dans les vaisseaux qui serait difficile à franchir, la navigation par flux entre en jeu. Le gradient magnétique est dirigé contre la paroi du vaisseau de manière à ce que la capsule soit entraînée dans le vaisseau approprié.
En intégrant ces trois stratégies de navigation, les chercheurs obtiennent un contrôle efficace des microrobots dans diverses conditions de flux et divers scénarios anatomiques. Dans plus de 95 % des cas testés, la capsule a réussi à acheminer le médicament au bon endroit. « Les champs magnétiques et les gradients sont idéaux pour les procédures mini-invasives, car ils pénètrent profondément dans le corps et, du moins aux intensités et fréquences que nous utilisons, n’ont aucun effet néfaste sur l’organisme », commente Bradley Nelson.
Une innovation qui ne s’arrête pas à la robotique
Afin de tester les microrobots et leur navigation dans un environnement réaliste, les chercheurs ont développé des modèles en silicone qui reproduisent fidèlement les vaisseaux sanguins de patients et d’animaux. Ces modèles de vaisseaux sont si réalistes qu’ils sont désormais utilisés dans la formation médicale et commercialisés par la spin-off de l’ETH Swiss Vascular. « Ces modèles sont essentiels pour nous, car nous nous sommes longuement entraînés pour optimiser la stratégie et ses composants. Cela n’est pas possible avec des animaux », indique Pané. Dans le modèle, les chercheurs ont pu cibler et dissoudre un caillot sanguin.
Après de nombreux essais concluants sur le modèle, l’équipe a cherché à démontrer ce que le microrobot pouvait accomplir dans des conditions cliniques réelles. Tout d’abord, elle a pu démontrer chez le porc que les trois méthodes de navigation fonctionnaient et que le microrobot restait clairement visible tout au long de la procédure. Ensuite, elle a fait naviguer des microrobots dans le liquide céphalo-rachidien d’un mouton. Landers est particulièrement satisfait : « Cet environnement anatomique complexe offre un énorme potentiel pour d’autres interventions thérapeutiques, c’est pourquoi nous étions si enthousiastes à l’idée que le microrobot puisse également trouver son chemin dans cet environnement. »
Des applications au-delà des occlusions vasculaires
Outre le traitement de la thrombose, ces nouveaux microrobots pourraient également être utilisés pour des infections ou des tumeurs localisées. À chaque étape du développement, l’équipe de recherche est restée concentrée sur son objectif : faire en sorte que tout ce qu’elle crée soit prêt à être utilisé dans les salles d’opération dès que possible. Le prochain objectif est de commencer les essais cliniques sur l’homme le plus rapidement possible. À propos de ce qui motive toute l’équipe, M. Landers conclut : « Les médecins font déjà un travail incroyable dans les hôpitaux. Ce qui nous motive, c’est de savoir que nous disposons d’une technologie qui nous permet d’aider les patients plus rapidement et plus efficacement et de leur donner un nouvel espoir grâce à des thérapies innovantes. »
Landers F, Hertle L, Pustovalov V et al.: Clinically ready magnetic microrobots for targeted therapies. Science 2025, DOI : 10.1126/science.adx1708
Source : ETHZ
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.