Jennifer Chu
Dans le monde horticole, certaines lianes sont particulièrement accrocheuses. En poussant, leurs vrilles ligneuses peuvent s’enrouler autour des obstacles avec une force suffisante pour abattre des clôtures et des arbres entiers.
Inspirés par la ténacité tortueuse des lianes, des ingénieurs du MIT et de l’Université de Stanford ont développé un préhenseur robotique capable de s’enrouler autour d’une variété d’objets et de les soulever, y compris un vase en verre et une pastèque, offrant une approche plus douce que les conceptions de préhenseurs conventionnels. Une version plus grande de ces robo-vrilles peut aussi soulever une personne hors de son lit en toute sécurité.
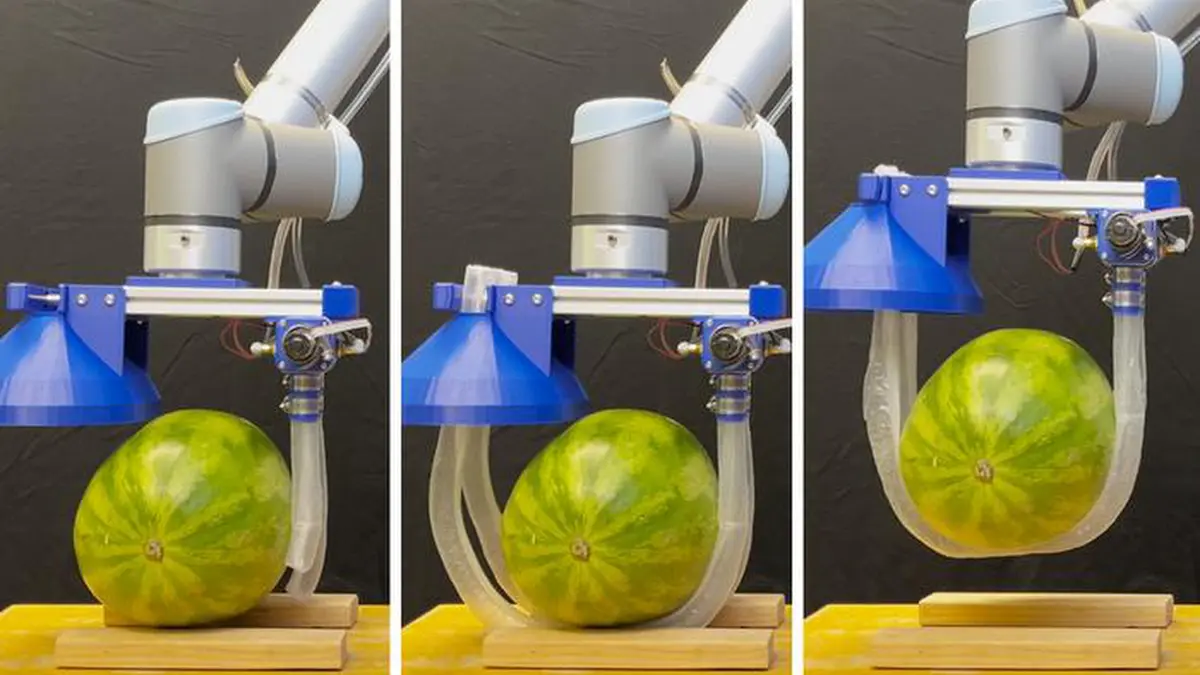
Le nouveau robot se compose d’une boîte pressurisée, positionnée près de l’objet cible, d’où de longs tubes semblables à des lianes se gonflent et grandissent, comme des chaussettes retournées. En s’étendant, les vrilles s’enroulent et se lovent autour de l’objet avant de continuer leur chemin vers la boîte, où elles sont automatiquement serrées en place et mécaniquement enroulées pour soulever délicatement l’objet dans une étreinte douce, semblable à un hamac.
Les chercheurs ont démontré que le robot-liane peut soulever en toute sécurité et de manière stable une variété d’objets lourds et fragiles. Le robot peut aussi se faufiler dans des espaces restreints et pousser à travers l’encombrement pour atteindre et saisir un objet désiré.
L’équipe imagine que ce type de préhenseur robotique pourrait être utilisé dans un large éventail de scénarios, de la récolte agricole au chargement et déchargement de cargaisons lourdes. À court terme, le groupe explore des applications dans les contextes de soins aux personnes âgées, où des vrilles robotiques souples et gonflables pourraient aider à soulever délicatement une personne hors de son lit.
« Transférer une personne hors de son lit est l’une des tâches les plus physiquement éprouvantes qu’un soignant effectue », explique Kentaro Barhydt, doctorant au Département de Génie Mécanique du MIT. « Ce genre de robot peut aider à soulager le soignant, et peut être plus doux et plus confortable pour le patient. »
Ouvert et fermé
Les collaborateurs de l’équipe à Stanford, dirigés par Okamura, ont été les pionniers du développement de robots souples inspirés des lianes qui grandissent vers l’extérieur depuis leur extrémité. Ces conceptions sont largement construites à partir de tubes pneumatiques fins mais robustes qui grandissent et se gonflent avec une pression d’air contrôlée. En grandissant, les tubes peuvent se tordre, se plier et serpenter à travers l’environnement, et se faufiler dans des espaces étroits et encombrés.
Les chercheurs ont surtout exploré les robots-lianes pour des utilisations dans les inspections de sécurité et les opérations de recherche et sauvetage. Mais au MIT, Barhydt et Asada, dont le groupe a développé des aides robotiques pour les personnes âgées, se sont demandé si de tels robots inspirés des lianes pourraient relever certains défis dans les soins aux personnes âgées — spécifiquement, le défi de soulever une personne hors de son lit en toute sécurité. Souvent, dans les contextes de soins infirmiers et de rééducation, ce processus de transfert est effectué avec un lève-personne, opéré par un soignant qui doit d’abord physiquement tourner le patient sur le côté, puis le replacer sur un drap en forme de hamac. Le soignant attache le drap autour du patient et l’accroche au lève-personne mécanique, qui peut alors soulever doucement le patient hors du lit, similaire à la suspension d’un hamac ou d’une élingue.
L’équipe du MIT et de Stanford a imaginé qu’en alternative, un robot semblable à une liane pourrait doucement se glisser sous et autour d’un patient pour créer sa propre sorte d’élingue, sans qu’un soignant ait à manœuvrer physiquement le patient. Mais pour soulever l’élingue, les chercheurs ont réalisé qu’ils devraient ajouter un élément manquant dans les conceptions existantes de robots-lianes : Essentiellement, ils devraient fermer la boucle.
La plupart des robots inspirés des lianes sont conçus comme des systèmes « en boucle ouverte », ce qui signifie qu’ils agissent comme des cordes ouvertes qui peuvent s’étendre et se plier dans différentes configurations, mais ils ne sont pas conçus pour se fixer à quoi que ce soit pour former une boucle fermée. Si un robot-liane pouvait être conçu pour passer d’une boucle ouverte à une boucle fermée, Barhydt a supposé qu’il pourrait se transformer en élingue autour de l’objet et se hisser, ainsi que ce qu’il pourrait contenir.
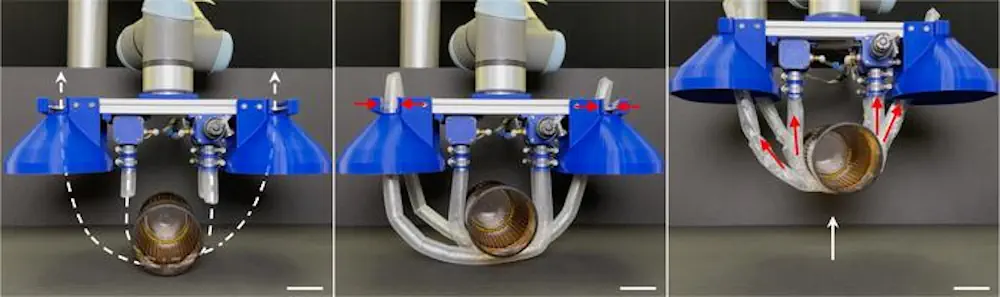
Pour leur nouvelle étude, Barhydt, Osele et leurs collègues décrivent la conception d’un nouveau préhenseur robotique inspiré des lianes qui combine à la fois des actions en boucle ouverte et fermée. Dans une configuration en boucle ouverte, une vrille robotique peut grandir et s’enrouler autour d’un objet pour créer une prise ferme. Elle peut même se glisser sous un humain allongé sur un lit. Une fois la prise effectuée, la vrille peut continuer à grandir vers sa source et s’y attacher, créant une boucle fermée qui peut ensuite être rétractée pour récupérer l’objet.
« Les gens pourraient supposer que pour saisir quelque chose, il suffit de tendre la main et de l’attraper », remarque Barhydt. « Mais il y a différentes étapes, comme le positionnement et la tenue. En transformant entre des boucles ouvertes et fermées, nous pouvons atteindre de nouveaux niveaux de performance en tirant parti des avantages des deux formes pour leurs étapes respectives. »
Suspension douce
Pour démontrer leur nouveau concept de boucle ouverte et fermée, l’équipe a construit un système robotique à grande échelle conçu pour soulever une personne d’un lit en toute sécurité. Le système comprend un ensemble de boîtes pressurisées attachées de chaque côté d’une barre aérienne. Une pompe à air à l’intérieur des boîtes gonfle lentement et déploie de fins tubes semblables à des lianes qui s’étendent vers la tête et les pieds d’un lit. La pression d’air peut être contrôlée pour faire travailler doucement les tubes sous et autour d’une personne, avant de s’étirer à nouveau vers leurs boîtes respectives. Les vrilles passent ensuite à travers un mécanisme de serrage qui les fixe à chaque boîte. Un treuil enroule les vrilles vers les boîtes, soulevant doucement la personne dans le processus.
« Les objets lourds mais fragiles, comme un corps humain, sont difficiles à saisir avec les mains robotiques disponibles aujourd’hui », constate Asada. « Nous avons développé un préhenseur robotique grandissant, semblable à une liane, qui peut s’enrouler autour d’un objet et le suspendre doucement et sûrement. »
« Il y a tout un espace de conception que nous espérons que ce travail inspirera nos collègues à continuer d’explorer », déclare le co-auteur principal Osele. « J’attends particulièrement avec impatience les implications pour les applications de transfert de patients dans les soins de santé. »
« Je suis très enthousiaste à l’idée de travaux futurs utilisant des robots comme ceux-ci pour assister physiquement les personnes ayant des difficultés de mobilité », ajoute la co-auteure Okamura. « Les robots souples peuvent être relativement sûrs, peu coûteux et optimisés pour des besoins humains spécifiques, contrairement à d’autres approches comme les robots humanoïdes. »
Bien que la conception de l’équipe ait été motivée par les défis des soins aux personnes âgées, les chercheurs ont réalisé que la nouvelle conception pourrait aussi être adaptée pour effectuer d’autres tâches de préhension. En plus de leur système à grande échelle, ils ont construit une version plus petite qui peut s’attacher à un bras robotique commercial. Avec cette version, l’équipe a montré que le robot-liane peut saisir et soulever une variété d’objets lourds et fragiles, y compris une pastèque, un vase en verre, un kettlebell, un tas de tiges métalliques et un ballon de terrain de jeu. Les vrilles peuvent aussi serpenter à travers un bac encombré pour en extraire un objet désiré.
« Nous pensons que ce type de conception robotique peut être adapté à de nombreuses applications », conclut Barhydt. « Nous réfléchissons aussi à l’appliquer à l’industrie lourde, et à des choses comme l’automatisation de l’opération des grues dans les ports et les entrepôts. »
Article : Loop closure grasping: Topological transformations enable strong, gentle, and versatile grasps – Journal : Science Advances – DOI : Lien vers l’étude
Barhydt, avec son co-premier auteur de Stanford, O. Godson Osele, et leurs collègues, présentent la nouvelle conception robotique aujourd’hui dans la revue Science Advances. Les co-auteurs de l’étude sont Harry Asada, professeur Ford d’ingénierie au MIT, et Allison Okamura, professeure Richard W. Weiland d’ingénierie à l’Université de Stanford, ainsi que Sreela Kodali et Cosmia du Pasquier à l’Université de Stanford, et l’ancien étudiant diplômé du MIT Chase Hartquist, maintenant à l’Université de Floride, Gainesville.
Source : MIT