La micro-robotique a connu une évolution rapide ces dernières années, permettant aux scientifiques de construire des machines minuscules capables de pénétrer dans des environnements difficiles d’accès, du corps humain aux sites de déchets contaminés. La propulsion de ces minuscules robots nécessite des solutions ingénieuses, car leur petite taille signifie qu’ils opèrent dans un domaine dominé par la viscosité plutôt que par l’inertie.
Une approche populaire utilise la compression et la raréfaction répétées des bulles d’air induites par des ondes acoustiques pour produire des flux de micro-courants capables de propulser le mouvement robotique.
La fragilité des bulles individuelles et la force limitée ont contraint l’adoption généralisée. Les chercheurs ont longtemps cherché l’inspiration dans la biologie pour la conception robotique.
Une équipe de l’Université de Twente dirigée par Sarthak Misra s’inspire du monde des métamatériaux acoustiques pour créer une nouvelle conception de micro-robot alimenté par l’acoustique. Leur approche bio-inspirée pourrait ouvrir de nouvelles possibilités pour le déploiement de microbots dans l’échantillonnage biologique, la médecine clinique, la remédiation environnementale et plus encore.
Réingénierie des micro-robots en tant que systèmes macroscopiques
Plutôt que de miniaturiser davantage, ce qui est la tendance dominante en micro-robotique, les chercheurs ont choisi de faire évoluer leur conception.
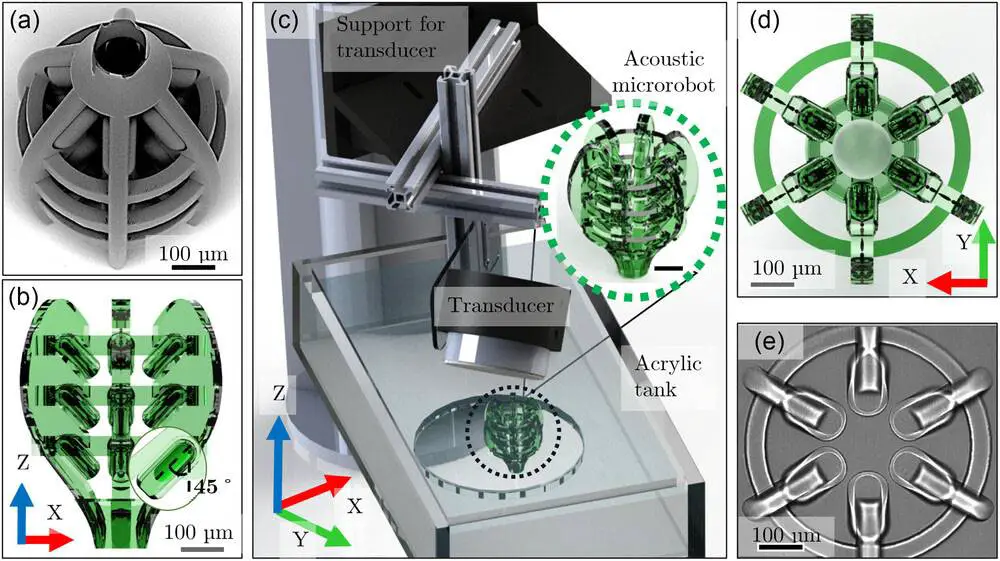
La fabrication du bot à l’aide d’une impression 3D d’écriture laser directe à haute résolution permet d’incorporer des caractéristiques structurelles subtiles comme des recoins rentrants qui stabilisent passivement les bulles sans traitement chimique de surface spécial.
De manière cruciale, l’agrandissement de la structure globale à une échelle de 0,5 mm la rend beaucoup plus simple à manipuler et à déployer que les conceptions typiques à l’échelle du micron. Contre-intuitivement, aller plus grand ouvre de nouvelles possibilités.

Mettre au travail des microbots hautement agiles
Pour démontrer les capacités de leur millibot alimenté par l’acoustique, les chercheurs ont montré comment il peut utiliser l’aspiration induite par le courant pour attirer et éliminer les débris. Cette fonctionnalité de lévitation et de nettoyage pourrait être précieuse pour les tâches d’échantillonnage biologique ou d’élimination des déchets dans des espaces confinés ou difficiles d’accès.
Lorsqu’il est actionné à des fréquences d’ultrasons spécifiques autour de 65-70 kHz, les flux de micro-courants périodiques génèrent suffisamment de force pour que le micro-robot s’oriente verticalement et se maintienne en lévitation de manière stable.
Le changement de fréquences module son mouvement, permettant le transport sur des distances supérieures à 10 fois le diamètre du bot.

En synthèse
En créant des microbots avec de nouvelles capacités, tout en facilitant simultanément la production et la manipulation, cette recherche démontre les mérites de l’application des principes des métamatériaux acoustiques de manière non conventionnelle. Leur réutilisation créative du paradigme d’agencement ordonné des bulles introduit de nouvelles idées en micro-robotique et en microfluidique.
Il démontre que l’hybridation de composants à l’échelle du micron avec des plateformes plus grandes peut améliorer de manière significative les performances du système. Cela renverse l’idée commune que la miniaturisation est intrinsèquement supérieure.
De plus, leur adoption d’un schéma de fabrication simplifié qui ne nécessite pas de modification chimique extensive de la surface ou de pièces mobiles à l’échelle nanométrique rend l’adoption de la nouvelle technologie beaucoup plus accessible.
Pour une meilleure compréhension
1. Qu’est-ce que la micro-robotique ?
La micro-robotique est un domaine de recherche qui se concentre sur la conception et la fabrication de robots de très petite taille, capables d’opérer dans des environnements difficiles d’accès, tels que le corps humain ou des sites de déchets contaminés.
2. Comment les bulles d’air sont-elles utilisées pour propulser les micro-robots ?
Les bulles d’air sont comprimées et raréfiées de manière répétée par des ondes acoustiques, ce qui génère des flux de micro-courants capables de propulser le mouvement robotique. Cependant, la fragilité des bulles individuelles et la force limitée ont contraint l’adoption généralisée de cette approche.
3. Que se cache t-il derrière la conception de micro-robot alimenté par l’acoustique ?
L’équipe de l’Université de Twente, dirigée par Sarthak Misra, s’inspire des métamatériaux acoustiques pour créer une nouvelle conception de micro-robot alimenté par l’acoustique. Leur approche bio-inspirée pourrait ouvrir de nouvelles possibilités pour le déploiement de microbots dans l’échantillonnage biologique, la médecine clinique, la remédiation environnementale et plus encore.
4. Quels sont les avantages de la conception de micro-robot à l’échelle macroscopique
En agrandissant la structure globale à une échelle de 0,5 mm, il devient beaucoup plus simple de manipuler et de déployer le micro-robot par rapport aux conceptions typiques à l’échelle du micron. Cette approche hybride, combinant des composants à l’échelle du micron avec des plateformes plus grandes, peut améliorer de manière significative les performances du système.
5. Quelles sont les applications potentielles de ces micro-robots ?
Les micro-robots alimentés par l’acoustique pourraient être utilisés pour l’échantillonnage biologique, la médecine clinique, la remédiation environnementale, l’extraction et la filtration sans contact, l’accès à des terrains complexes en 3D et la circulation à l’intérieur de dispositifs microfluidiques pour diriger et manipuler les flux et les particules.
Principaux enseignements
| Enseignement | Description |
|---|---|
| Microrobotique | Conception et fabrication de robots de très petite taille pour des environnements difficiles d’accès. |
| Propulsion par bulles | Utilisation de bulles d’air comprimées et raréfiées par des ondes acoustiques pour propulser les microrobots. |
| Inspiration | Utilisation des principes des métamatériaux acoustiques pour créer une nouvelle conception de microrobot. |
| Conception macroscopique | Agrandissement de la structure globale à 0,5 mm pour faciliter la manipulation et le déploiement. |
| Applications potentielles | Échantillonnage biologique, médecine clinique, remédiation environnementale, extraction et filtration sans contact. |
| Amélioration des performances | Augmentation de 80% de la vitesse de micro-courant grâce à l’agencement des microbulles. |
| Hybridation | Combinaison de composants à l’échelle du micron avec des plateformes plus grandes pour améliorer les performances du système. |
| Fabrication simplifiée | Utilisation de l’impression 3D pour créer des microrobots sans modification chimique extensive de la surface. |
| Accessibilité | La nouvelle technologie est plus accessible grâce à la fabrication simplifiée et à l’absence de pièces mobiles à l’échelle nanométrique. |
| Potentiel futur | Les microrobots pourraient être utilisés dans des dispositifs de diagnostic, de dépollution et de contrôle de la qualité des microfluides. |
Références
L’équipe a présenté ses résultats dans la revue Advanced Intelligent Systems. Article : « Acoustically Actuated Flow in Microrobots Powered by Axisymmetric Resonant Bubbles«