
La navigation sous-marine précise est essentielle pour les véhicules autonomes et télécommandés en eaux profondes, mais les variations de la vitesse du son dans l’eau de mer introduisent souvent des erreurs systématiques de positionnement acoustique. Cette étude présente un schéma de correction in-situ du profil de vitesse du son (SSP) conçu pour améliorer l’intégration du système de navigation inertielle à plateforme liée (SINS) et de la base ultra-courte (USBL).
En utilisant la théorie du tracé de rayons acoustiques, la méthode relie les perturbations de la vitesse du son aux déviations de positionnement, et intègre un filtre d’information adaptatif à deux étages pour estimer les variations du SSP tout en détectant en temps réel les valeurs aberrantes de l’USBL. Des simulations et des essais en mer démontrent des améliorations notables de la précision positionnelle, permettant une navigation plus stable dans des environnements océaniques variables et soutenant les levés de haute précision en eaux profondes.
La navigation sous-marine repose couramment sur la fusion SINS/USBL car les signaux satellites ne peuvent pénétrer l’eau de mer. Cependant, la précision de la navigation diminue avec la profondeur et la distance en raison de la vitesse du son non uniforme, qui varie avec la température, la salinité et la pression dans le temps et la profondeur. Les profils de vitesse du son pré-mesurés servent de références initiales, mais les missions de longue endurance subissent une dérive temporelle du SSP, provoquant des erreurs de temps de parcours et d’angle induites par la réfraction qui s’accumulent dans les résultats de navigation. La correction traditionnelle repose sur des mesures statiques de profileur CTD (conductivité-température-profondeur) ou des modèles empiriques qui ne parviennent pas à s’adapter aux conditions en temps réel. En raison de ces problèmes, des recherches sont nécessaires pour estimer dynamiquement la variation de la vitesse du son et compenser la distorsion du positionnement acoustique pendant les missions en eaux profondes.
Des chercheurs de et d’institutions collaboratrices ont rapporté un nouveau schéma de correction du SSP en temps réel pour la navigation SINS/USBL étroitement couplée, publié (DOI : 10.1186/s43020-025-00181-w) dans Satellite Navigation en 2025. La méthode modélise la variabilité temporelle du SSP en utilisant le tracé de rayons acoustiques et applique un filtre d’information adaptatif à deux étages pour estimer conjointement la perturbation de la vitesse du son et identifier les valeurs aberrantes de l’USBL. Vérifiée par des simulations et des expérimentations sur le terrain en mer de Chine méridionale, cette approche réduit significativement l’erreur de navigation et soutient des opérations fiables en eaux profondes.
Le travail commence par analyser comment un SSP variant dans le temps affecte la propagation acoustique de l’USBL, modifiant les angles d’incidence des rayons et le temps de parcours. Sur la base de la loi de Snell, l’équipe a dérivé des relations aux dérivées partielles entre la perturbation de la vitesse du son et les déplacements horizontaux/verticaux. Un modèle de quasi-observation a été construit, permettant l’estimation de la perturbation du SSP à travers les différences entre le temps de parcours dérivé du SINS et celui mesuré par l’USBL.
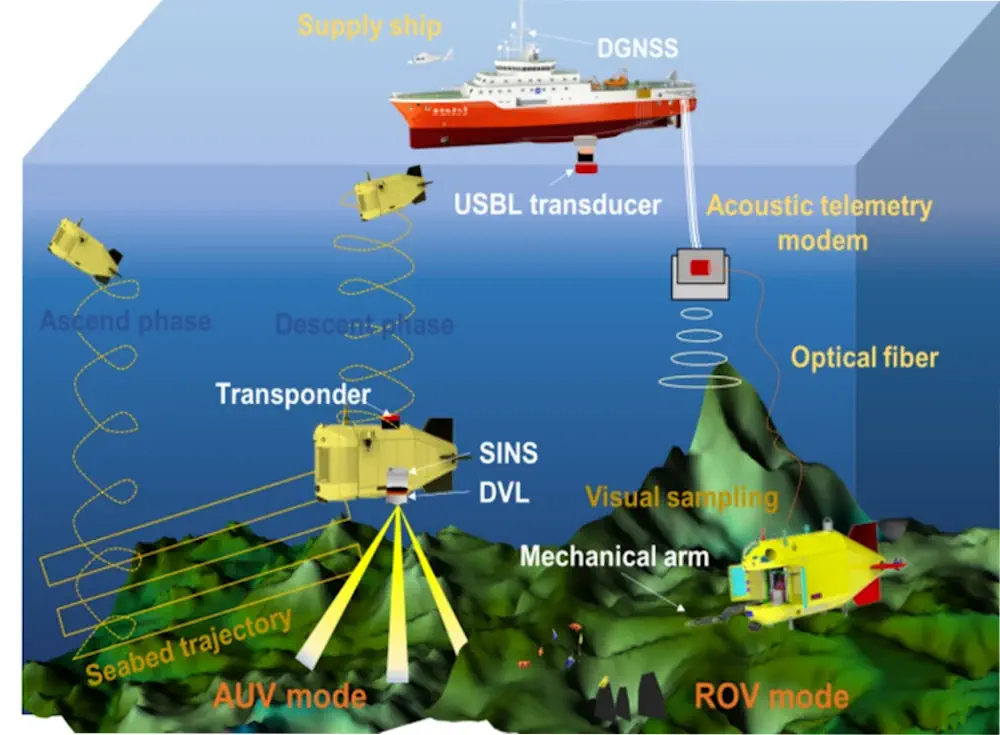
Une représentation de la perturbation du SSP du second ordre sépare la couche mélangée des eaux peu profondes, la zone de transition de la thermocline et la couche isotherme profonde, reflétant la distribution réaliste de la vitesse du son avec la profondeur. Pour fusionner les données de navigation, les chercheurs ont conçu un filtre d’information adaptatif à deux étages (ATI) combinant les observations du SINS, du journal de vitesse Doppler (DVL), du manomètre (PG) et de l’USBL. Le filtre met à jour les erreurs de position, de vitesse et d’attitude tout en détectant simultanément les anomalies de l’USBL via un test du rapport de vraisemblance généralisé et en affinant l’estimation du SSP via les moindres carrés récursifs. Des simulations utilisant des ensembles de données CTD collectées par MVP ont montré que, sans correction du SSP, les erreurs de positionnement horizontal de l’USBL atteignaient plusieurs mètres. Avec l’algorithme proposé, l’erreur quadratique moyenne a chuté de manière marquée. Les essais en mer ont montré que la position RMS s’est améliorée de 0,45 m à 0,08 m vers le nord et de 0,23 m à 0,07 m vers l’est, améliorant la précision de plus de 80 % dans des conditions réelles de mission.
Selon les auteurs, la reconstruction en temps réel du SSP est cruciale pour traiter la dérive de la navigation dans les systèmes acoustiques en eaux profondes. « La navigation traditionnelle dépend souvent de profils de vitesse du son statiques, qui deviennent rapidement obsolètes lors de longues missions. Notre modèle intègre le tracé de rayons physiques avec un filtrage adaptatif, permettant aux véhicules autonomes télécommandés (ARV) de détecter et de corriger les changements de vitesse du son plutôt que de s’appuyer sur des entrées fixes« , a souligné l’équipe. Ils estiment que cette approche soutiendra la cartographie, l’échantillonnage et la détection des ressources des fonds marins dans l’océan profond, où une localisation précise est requise dans des conditions environnementales dynamiques.
Ce cadre de correction du SSP offre une voie pratique vers des systèmes de navigation en eaux profondes auto-adaptatifs. En réduisant la dépendance aux levés CTD externes et en améliorant la résilience à la distorsion acoustique, il renforce la robustesse de la navigation pendant les déploiements de longue durée. La méthode est bien adaptée aux véhicules autonomes télécommandés (ARV) et aux véhicules sous-marins autonomes (AUV) effectuant de la cartographie des fonds marins, de la surveillance écologique, de l’exploration minérale, du routage sous la glace ou des missions autonomes de longue portée. Des développements futurs pourraient intégrer une prédiction du SSP basée sur l’apprentissage automatique ou des données océanographiques multi-capteurs pour une correction proactive. Les auteurs prévoient son potentiel pour améliorer l’efficacité et la fiabilité des données dans les futures explorations en eaux profondes et l’évaluation des ressources marines.
À propos de Satellite Navigation / Satellite Navigation (E-ISSN : 2662-1363 ; ISSN : 2662-9291) est la revue officielle de l’Institut de recherche en information aérospatiale, Académie chinoise des sciences. La revue vise à rapporter des idées innovantes, de nouveaux résultats ou des progrès sur les techniques théoriques et les applications de la navigation par satellite. La revue accueille des articles originaux, des revues et des commentaires.
Article : An in-situ sound speed profile correction scheme for the tight-coupling integration of SINS/USBL in deep-sea ARV navigation – Journal : Satellite Navigation – DOI : Lien vers l’étude
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.

















