Une équipe d’ingénieurs aux États-Unis a franchi une nouvelle étape dans le développement de robots souples et de systèmes portables qui imitent la capacité de la peau humaine et végétale à détecter et à guérir automatiquement les blessures.
L’ingénieur Eric Markvicka de l’université du Nebraska-Lincoln, a récemment présenté un article lors de la prestigieuse conférence internationale IEEE sur la robotique et l’automatisation à Atlanta, en Géorgie. Cet article expose une approche systémique pour une technologie de robotique souple capable d’identifier les dommages causés par une perforation ou une pression extrême, de localiser précisément leur emplacement et de déclencher automatiquement leur réparation.
Cet article figurait parmi les 39 articles sélectionnés parmi 1 606 soumissions pour le prix du meilleur article de l’ICRA 2025. Il a également été finaliste pour le prix du meilleur article étudiant et dans la catégorie mécanisme et conception.
La stratégie de l’équipe pourrait contribuer à résoudre un problème de longue date dans le développement de systèmes robotiques souples qui importent des principes de conception inspirés de la nature.
« Dans notre communauté, il existe une forte tendance à reproduire les systèmes rigides traditionnels à l’aide de matériaux souples, et un mouvement important vers le biomimétisme », a déclaré Markvicka, professeur adjoint Robert F. et Myrna L. Krohn en génie biomédical. « Bien que nous ayons réussi à créer des composants électroniques et des actionneurs extensibles qui sont souples et conformes, ils n’imitent souvent pas la biologie dans leur capacité à réagir aux dommages et à déclencher une autoréparation. »
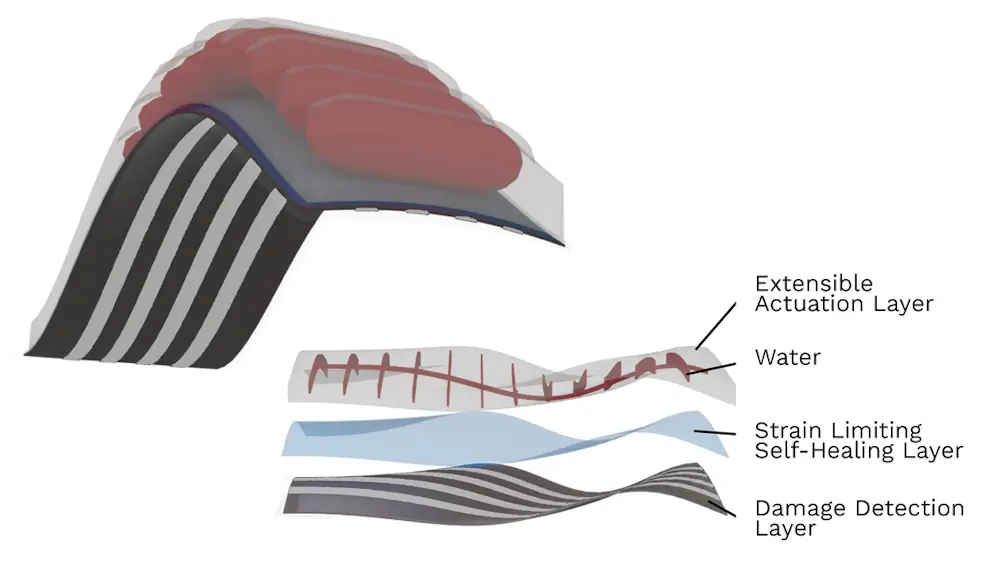
Pour combler cette lacune, son équipe a mis au point un muscle artificiel intelligent et auto-réparateur, doté d’une architecture multicouche qui permet au système d’identifier et de localiser les dommages, puis de déclencher un mécanisme d’auto-réparation, le tout sans intervention externe.
« Le corps humain et les animaux sont étonnants. Nous pouvons nous couper, nous blesser et subir des blessures assez graves. Et dans la plupart des cas, avec des applications externes très limitées de bandages et de médicaments, nous sommes capables d’auto-guérir beaucoup de choses », a ajouté Markvicka. « Si nous pouvions reproduire cela dans des systèmes synthétiques, cela transformerait vraiment le domaine et notre façon de concevoir l’électronique et les machines. »
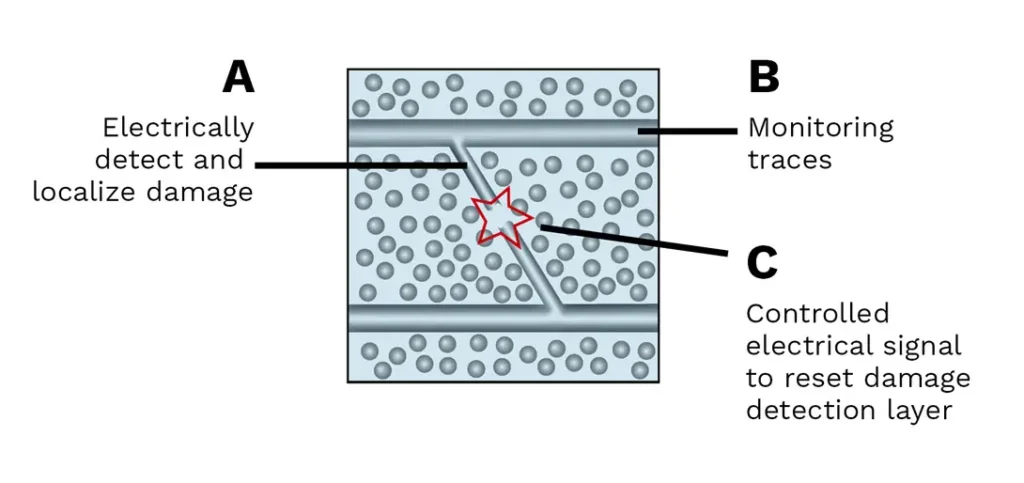
Le « muscle » de l’équipe, ou actionneur, la partie d’un robot qui convertit l’énergie en mouvement physique, comporte trois couches. La couche inférieure, qui détecte les dommages, est une peau électronique souple composée de microgouttelettes de métal liquide intégrées dans un élastomère de silicone. Cette peau est collée à la couche intermédiaire, le composant auto-cicatrisant, qui est un élastomère thermoplastique rigide. Au-dessus se trouve la couche d’actionnement, qui déclenche le mouvement du muscle lorsqu’elle est mise sous pression avec de l’eau.
Pour lancer le processus, l’équipe induit cinq courants de surveillance à travers la « peau » inférieure du muscle, qui est connectée à un microcontrôleur et à un circuit de détection. Une perforation ou une pression sur cette couche déclenche la formation d’un réseau électrique entre les traces. Le système reconnaît cette empreinte électrique comme une preuve de dommage et augmente ensuite le courant circulant dans le réseau électrique nouvellement formé.
Cela permet à ce réseau de fonctionner comme un chauffage Joule local, convertissant l’énergie du courant électrique en chaleur autour des zones endommagées. Après quelques minutes, cette chaleur fait fondre et retraitement la couche thermoplastique intermédiaire, qui scelle les dommages, réparant ainsi efficacement la blessure.
La dernière étape consiste à réinitialiser le système à son état d’origine en effaçant l’empreinte électrique des dommages de la couche inférieure. Pour ce faire, l’équipe de Markvicka exploite les effets de l’électromigration, un processus dans lequel un courant électrique provoque la migration des atomes métalliques. Ce phénomène est traditionnellement considéré comme un obstacle dans les circuits métalliques, car les atomes en mouvement déforment et provoquent des lacunes dans les matériaux d’un circuit, entraînant la défaillance et la rupture des appareils.
Dans le cadre d’une innovation majeure, les chercheurs utilisent l’électromigration pour résoudre un problème qui a longtemps entravé leurs efforts pour créer un système autonome et auto-réparateur : la permanence apparente des réseaux électriques endommagés dans la couche inférieure. Sans la possibilité de réinitialiser les traces de surveillance de base, le système ne peut pas effectuer plus d’un cycle de dommages et de réparations.
Les chercheurs ont réalisé que l’électromigration, avec sa capacité à séparer physiquement les ions métalliques et à déclencher une défaillance en circuit ouvert, pourrait être la clé pour effacer les traces nouvellement formées. La stratégie a fonctionné : en augmentant encore le courant, l’équipe peut induire des mécanismes d’électromigration et de défaillance thermique qui réinitialisent le réseau de détection des dommages.
« L’électromigration est généralement considérée comme un énorme inconvénient », a précisé M. Markvicka. « C’est l’un des obstacles qui ont empêché la miniaturisation de l’électronique. Nous l’utilisons ici d’une manière unique et vraiment positive. Au lieu d’essayer de l’empêcher, nous l’exploitons pour la première fois afin d’effacer des traces que nous pensions permanentes. »
La technologie d’auto-réparation autonome pourrait révolutionner de nombreux secteurs. Dans les États agricoles comme le Nebraska, elle pourrait être une aubaine pour les systèmes robotiques qui rencontrent fréquemment des objets pointus tels que des brindilles, des épines, du plastique et du verre. Elle pourrait également révolutionner les appareils portables de surveillance de la santé qui doivent résister à l’usure quotidienne.
Cette technologie profiterait également à la société dans son ensemble. La plupart des appareils électroniques grand public ont une durée de vie de seulement un ou deux ans, ce qui contribue à la production de milliards de kilos de déchets électroniques chaque année. Ces déchets contiennent des toxines telles que le plomb et le mercure, qui menacent la santé humaine et l’environnement. La technologie d’auto-réparation pourrait aider à endiguer ce phénomène.
« Si nous pouvons commencer à créer des matériaux capables de détecter de manière autonome et acceptable les dommages, puis de déclencher ces mécanismes d’auto-réparation, cela serait vraiment révolutionnaire », a conclu l’ingénieur.
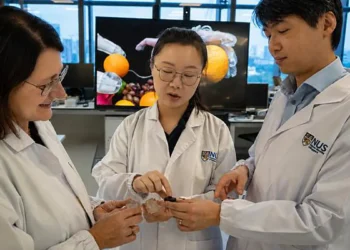
Légende illustration : Eric Markvicka (à gauche), professeur adjoint de génie biomédical Robert F. et Myrna L. Krohn, ainsi que les étudiants diplômés Ethan Krings (à droite) et Patrick McManigal (non représenté), ont récemment présenté leurs travaux sur un muscle artificiel intelligent et auto-réparateur lors de la conférence internationale de l’IEEE sur la robotique et l’automatisation.
Article : « Intelligent Self-Healing Artificial Muscle: Mechanisms for Damage Detection and Autonomous Repair of Puncture Damage in Soft Robotics » – DOI :
Source : U. Nebraska Lincoln
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.