Une lésion de la moelle épinière chez la plupart des vertébrés inhibe probablement la locomotion et induit une paralysie. Ce n’est pas le cas chez les anguilles. Non seulement elles ont la capacité de se déplacer dans l’eau et, étonnamment, sur terre lorsqu’elles sont intactes, mais elles peuvent également continuer à nager même si leur moelle épinière est sectionnée.
Les mécanismes neuronaux à l’origine de ces capacités incroyables sont restés longtemps un mystère. En savoir plus sur les mécanismes de contrôle à l’origine de la locomotion des anguilles pourrait améliorer radicalement le développement des robots afin de leur permettre de mieux naviguer dans des environnements divers et difficiles.
C’est exactement ce qu’a fait un groupe international de chercheurs en intégrant deux types de rétroaction sensorielle dans un modèle de circuit neuronal pour les poissons allongés de type anguille et en le testant à l’aide d’une simulation informatique et d’expériences avec un robot réel. Leurs conclusions ont révélé que les anguilles s’appuient sur des signaux provenant de leur corps, tels que la sensation d’étirement et de pression sur la peau, pour s’adapter à différents environnements. Ces signaux, associés au rythme inhérent au système nerveux, peuvent suffire à coordonner les mouvements même après une grave lésion de la moelle épinière.
« Nos résultats aideront à concevoir des robots hautement adaptatifs, capables de naviguer dans des environnements complexes et imprévisibles », a expliqué Kotaro Yasui, professeur adjoint à l’Institut de recherche interdisciplinaire de pointe (FRIS) de l’université de Tohoku et auteur principal de l’étude.
Yasui et ses collègues ont d’abord cherché à découvrir le principe de contrôle qui régit les mouvements des anguilles. Ils ont d’abord développé un modèle mathématique d’un circuit neuronal qui intègre deux rétroactions sensorielles : l’étirement et la pression. Le modèle supposait que chaque segment du corps possède son propre circuit neuronal, comme un générateur de motifs centraux, qui produit des rythmes de mouvement régulés par ces signaux sensoriels.
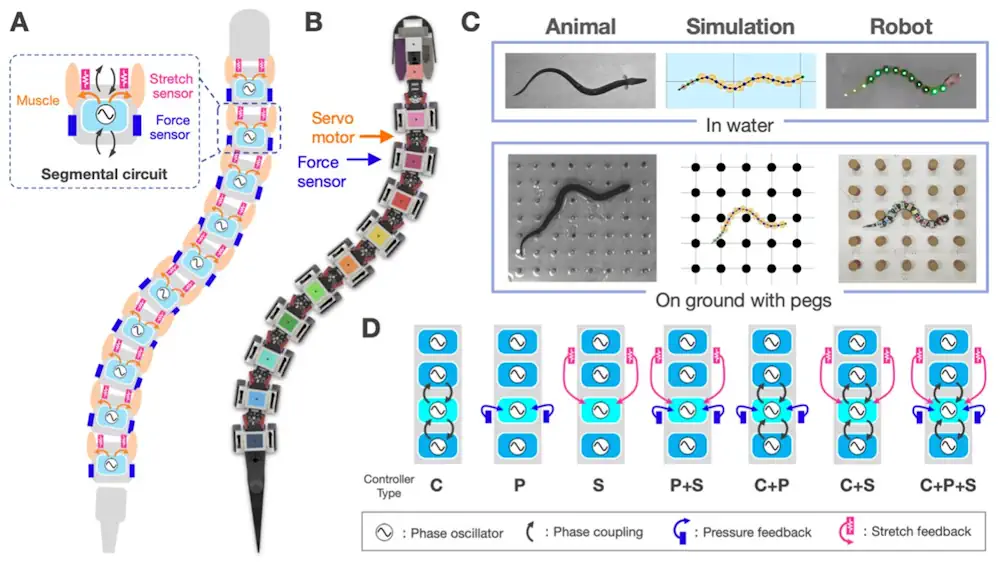
Ils ont testé leur modèle à l’aide de simulations informatiques et d’expériences robotiques, où le modèle a rapidement produit une nage stable grâce au retour sensoriel. Ce même circuit neuronal a également permis au robot de ramper sur terre et de contourner des obstacles, le retour d’étirement étant essentiel pour pousser contre les obstacles afin de générer une poussée vers l’avant.
Afin d’étudier comment les anguilles continuent à se déplacer après une lésion de la moelle épinière, le groupe a mené des expériences de sectionnement de la moelle épinière sur de véritables anguilles, ainsi que des expériences de simulation et des expériences robotisées à l’aide du modèle de circuit neuronal avec rétroaction d’étirement et de pression. Les expériences de simulation et les expériences robotisées ont révélé que la combinaison de la rétroaction multisensorielle et de la capacité intrinsèque des circuits à générer des rythmes permet au corps de synchroniser ses mouvements au-delà du site de la lésion, même sans input du cerveau.
Cette étude a eu pour avantage supplémentaire d’approfondir notre compréhension évolutive de la locomotion.
« La découverte qu’un circuit neuronal de nage soutient également le mouvement sur terre suggère que les vertébrés n’ont peut-être pas eu besoin d’un circuit neuronal entièrement nouveau lorsqu’ils sont passés à la vie terrestre ; au contraire, les circuits de nage flexibles ont été réutilisés, réduisant ainsi le besoin d’un contrôle descendant complexe tout en permettant un mouvement efficace dans différents environnements », a ajouté Akio Ishiguro, professeur à l’Institut de recherche en communication électrique (RIEC) de l’université de Tohoku et coauteur de l’article.
L’équipe de l’université de Tohoku comprenait également des chercheurs de l’université Future de Hakodate, de l’École polytechnique fédérale de Lausanne et de l’université d’Ottawa.
Article : « Multisensory feedback makes swimming circuits robust against spinal transection and enables terrestrial crawling in elongate fish » – Auteurs : Kotaro Yasui, Astha Gupta, Qiyuan Fu, Shura Suzuki, Jeffrey Hainer, Laura Paez, Keegan Lutek, Jonathan Arreguit, Takeshi Kano, Emily M. Standen, Auke J. Ijspeert, Akio Ishiguro – Journal: Proceedings of the National Academy of Sciences of the United States of America – DOI: 10.1073/pnas.2422248122
Source : Tohoku U.
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.