Contrairement aux poissons, les méduses n’ont pas d’os et ne possèdent qu’un réseau nerveux rudimentaire, mais elles peuvent parcourir des distances considérables avec une dépense d’énergie minimale. Le glissement apparemment sans effort d’une méduse dans l’eau est dû à un anneau de muscles dans son ventre mou, qui crée un simple jet qui la propulse vers l’avant. Les scientifiques qualifient cette capacité intrinsèque d’« intelligence incarnée », ce qui suggère que la structure physique de l’organisme joue un rôle dans la résolution des problèmes.
Lorsqu’elle est exploitée, cette locomotion constitue un moyen efficace de surveiller les récifs coralliens, de suivre les marées noires et d’observer les tendances climatiques. Les « méduses cyborgs » nécessitent un minimum d’énergie et fonctionnent sans moteur, ce qui limite l’impact environnemental associé aux méthodes actuelles d’étude des vastes étendues océaniques.
Dans le cadre d’une étude novatrice, une équipe de recherche dirigée par Dai Owaki, professeur agrégé au département de robotique de l’école supérieure d’ingénierie de l’université de Tohoku, a réussi à moduler le comportement de nage des méduses à l’aide de légères impulsions électriques. En outre, ils ont utilisé un modèle léger d’intelligence artificielle (IA) pour prédire la vitesse de nage de chaque méduse.
Les résultats, publiés dans la revue Nature Communications, illustrent le potentiel de collaboration entre les animaux marins à corps mou et les systèmes électroniques de base dans les environnements aquatiques, tout en préservant le style de nage naturel des animaux.
« Notre équipe de recherche s’est posé deux questions interdépendantes », indique M. Owaki. « Premièrement, pouvons-nous identifier un modèle d’impulsion que la méduse accepte, lui permettant de nager à des vitesses prédéterminées sans stress excessif ? Deuxièmement, une fois que la méduse répond à ces signaux, pouvons-nous développer un outil d’intelligence artificielle compact capable de prédire son mouvement dans n’importe quelle direction ? En répondant à ces questions, nous pouvons ouvrir la voie à des sondes océaniques à faible consommation d’énergie et respectueuses de l’environnement ».
L’équipe d’Owaki comprenait également Max Austin, professeur adjoint, et Kohei Nakajima, professeur associé, tous deux du département de mécano-informatique de l’école supérieure des sciences et technologies de l’information de l’université de Tokyo, ainsi que Shuhei Ikeda et Kazuya Okuizumi de l’aquarium Kamo de Tsuruoka City, dans la préfecture de Yamagata.
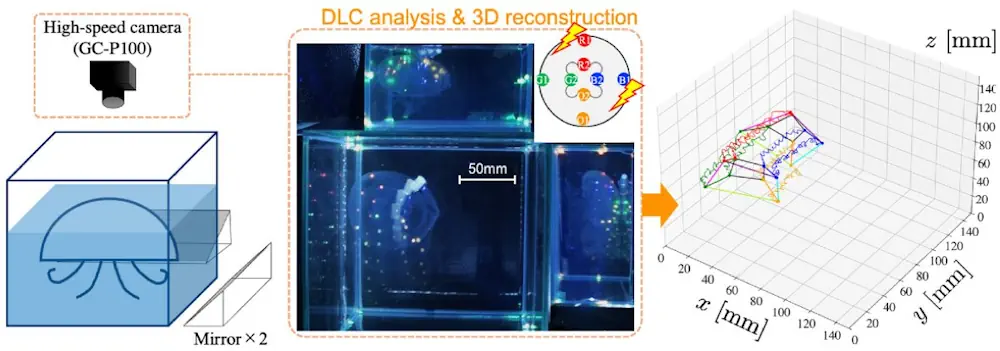
L’équipe a placé des électrodes miniatures sur l’anneau musculaire de la méduse et a délivré de brèves impulsions électriques toutes les 1,5 à 2 secondes. Chaque épisode de nage a été enregistré à l’aide d’une caméra munie de deux miroirs, et la trajectoire tridimensionnelle complète a été reconstituée sur un ordinateur portable. La synchronisation la plus efficace des impulsions s’est alignée sur le rythme naturel de la méduse, ce qui a permis d’augmenter sa vitesse de nage. Ces données ont ensuite été introduites dans un modèle d’IA hybride léger de « réservoir physique » qui incorpore le corps de la méduse en tant que composant intégral du système de calcul. Le modèle s’est avéré suffisamment précis pour prédire les vitesses futures dans toutes les directions transversales.
« Nous avons été intrigués de découvrir que les signaux de contrôle les plus efficaces n’étaient pas les impulsions rapides, mais plutôt ceux qui reflétaient le rythme naturel de la méduse », ajoute Dai Owaki. « Les tentatives d’utilisation d’impulsions plus fortes ou plus rapides ont entraîné une diminution de l’efficacité de la nage et des mouvements erratiques, ce qui souligne l’importance de s’aligner sur les rythmes naturels plutôt que de s’y opposer. »
L’idée d’un organisme vivant agissant comme un dispositif informatique peut sembler relever de la science-fiction, mais elle pourrait révolutionner de nombreux domaines. Dans le domaine de la robotique, les organismes à corps mou pourraient inspirer des innovations dans la conception d’objets dotés de propriétés d’autoréparation et de flexibilité. Dans le domaine de la recherche climatique, des flottes de méduses cyborg pourraient naviguer dans les océans pendant de longues périodes, cartographiant la température, la salinité et la pollution plastique sans avoir besoin de batteries. Cette étude fait donc le lien entre les sciences marines et l’ingénierie grâce au développement d’un nageur cyborg unique et doux.
Les méduses ont été choisies pour cette recherche en raison de leur remarquable efficacité de nage parmi les animaux marins, ce qui en fait un modèle idéal pour explorer la synergie entre les systèmes biologiques et le matériel simple. L’observation de ces gracieuses créatures glissant dans l’eau a incité l’équipe de recherche à développer une technologie qui s’harmonise avec les écosystèmes vivants au lieu de les perturber.
Article : « Harnessing Natural Embodied Intelligence for Spontaneous Jellyfish Cyborgs » – Auteurs : Dai Owaki, Max Austin, Shuhei Ikeda, Kazuya Okuizumi, Kohei Nakajima – Nature Communications – DOI: 10.1038/s41467-025-59889-7
Source : U. Tohoku
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.