La complexité de la dextérité humaine a longtemps échappé aux robots. Aujourd’hui, une étude récente a ouvert de nouvelles voies dans cette quête en introduisant le capteur L3 F-TOUCH, qui améliore considérablement la capacité de détection des forces chez les robots.
La main humaine est une merveille de dextérité. Capable de percevoir la pression, la température, la texture, et la douleur, elle distingue également les objets selon leur forme, leur taille, leur poids, et bien d’autres propriétés physiques. Malheureusement, la plupart des mains robotiques actuelles ne sont pas à la hauteur de leur équivalent humain en raison de l’absence de capacités haptiques intégrées. Cette lacune rend difficile la manipulation des objets.
Sans connaissance des forces d’interaction et de la forme de l’objet manipulé, les doigts du robot ne peuvent « sentir » l’objet. Il pourrait donc facilement le laisser glisser ou même l’écraser s’il est fragile.
Un capteur tactile qui révolutionne le sens du toucher chez les robots
Dans une étude menée par le professeur Kaspar Althoefer de l’université Queen Mary de Londres, un nouveau capteur de bout de doigt à haute résolution est présenté : le L3 F-TOUCH. Les initiales L3 signifient Lightweight (léger), Low-cost (à faible coût) et wireLess (sans fil). Ce capteur est capable de mesurer la géométrie d’un objet et de déterminer les forces nécessaires pour interagir avec celui-ci.
Contrairement à d’autres capteurs qui estiment les forces d’interaction grâce à l’information tactile obtenue par des images de caméra, le L3 F-TOUCH mesure ces forces directement, assurant une plus grande précision.
« Contrairement à ses concurrents qui estiment les forces d’interaction expérimentées à travers la reconstruction à partir d’images de caméra de la déformation de leur élastomère souple, le L-3 F-TOUCH mesure les forces d’interaction directement grâce à une structure de suspension mécanique intégrée avec un système de miroir, obtenant une précision de mesure plus élevée et une plus grande plage de mesure. Le capteur est physiquement conçu pour découpler les mesures de force de l’information géométrique. Par conséquent, la force détectée sur trois axes est immunisée contre la géométrie du contact par rapport à ses concurrents. Grâce à des communications sans fil intégrées, le capteur surpasse également les concurrents en termes d’intégrabilité avec les mains des robots. », explique le professeur Kaspar Althoefer.
Lorsque le capteur touche la surface, une structure de suspension compacte permet à l’élastomère – un matériau semblable à du caoutchouc qui se déforme pour mesurer la géométrie de contact à haute résolution lorsqu’il est soumis à une force externe – de se déplacer au contact.
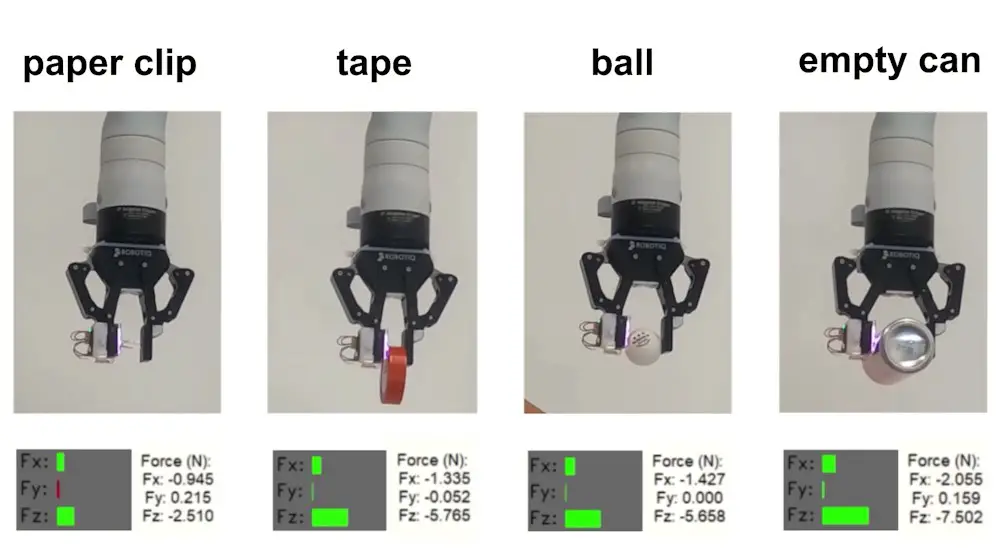
Pour interpréter ces données, le déplacement de l’élastomère est suivi en détectant le mouvement d’un marqueur spécial, un ARTag. Cela nous permet de mesurer les forces de contact le long des trois axes principaux (x, y et z) grâce à un processus d’étalonnage.
« Nous concentrerons nos futurs travaux sur l’extension des capacités du capteur pour mesurer non seulement la force le long des trois axes principaux, mais aussi les forces de rotation, comme le couple, qui pourraient être ressenties lors du vissage, tout en restant précis et compact. Ces avancées peuvent permettre le sens du toucher pour des robots plus dynamiques et agiles dans les tâches de manipulation, même dans des contextes d’interaction humain-robot, comme pour la rééducation des patients ou le soutien physique des personnes âgées. », ajoute le professeur Althoefer.
En synthèse
Cette innovation dans le domaine de la robotique pourrait préparer le terrain pour des robots plus avancés et fiables à l’avenir. Avec le capteur L3 F-TOUCH, les robots pourraient acquérir un sens du toucher, les rendant plus aptes à manipuler des objets et à effectuer des tâches de manipulation complexes.
Pour une meilleure compréhension
Qu’est-ce que le capteur L3 F-TOUCH ?
Le L3 F-TOUCH est un capteur de bout de doigt à haute résolution qui peut mesurer la géométrie d’un objet et déterminer les forces nécessaires pour interagir avec lui.
Comment fonctionne le capteur L3 F-TOUCH ?
Lorsque le capteur touche la surface, une structure de suspension compacte permet à un élastomère de se déplacer au contact. Le déplacement de l’élastomère est suivi en détectant le mouvement d’un marqueur spécial, un ARTag, ce qui nous permet de mesurer les forces de contact le long des trois axes principaux (x, y et z).
Quels sont les avantages du capteur L3 F-TOUCH par rapport aux autres capteurs ?
Le capteur L3 F-TOUCH est plus précis que d’autres capteurs car il mesure directement les forces d’interaction. De plus, il est physiquement conçu pour découpler les mesures de force de l’information géométrique, ce qui signifie que la force détectée sur trois axes n’est pas affectée par la géométrie du contact.
Étude récente, publiée dans IEEE Robotics and Automation Letters (« L3 F-TOUCH : A Wireless GelSight With Decoupled Tactile and Three-Axis Force Sensing« )