La fusion entre technologie et art n’est pas nouvelle. Néanmoins, lorsque l’ancienne tradition japonaise de l’origami rencontre la robotique moderne, les résultats peuvent être tout simplement étonnants. Les ingénieurs ont longtemps exploré les avantages potentiels des robots modulaires capables de modifier leur configuration pour s’adapter à des environnements changeants.
Une équipe de chercheurs chinois a réussi à repousser les limites en tirant inspiration d’un pliage origami particulier : le motif Kresling.
Un nouveau design aux possibilités illimitées
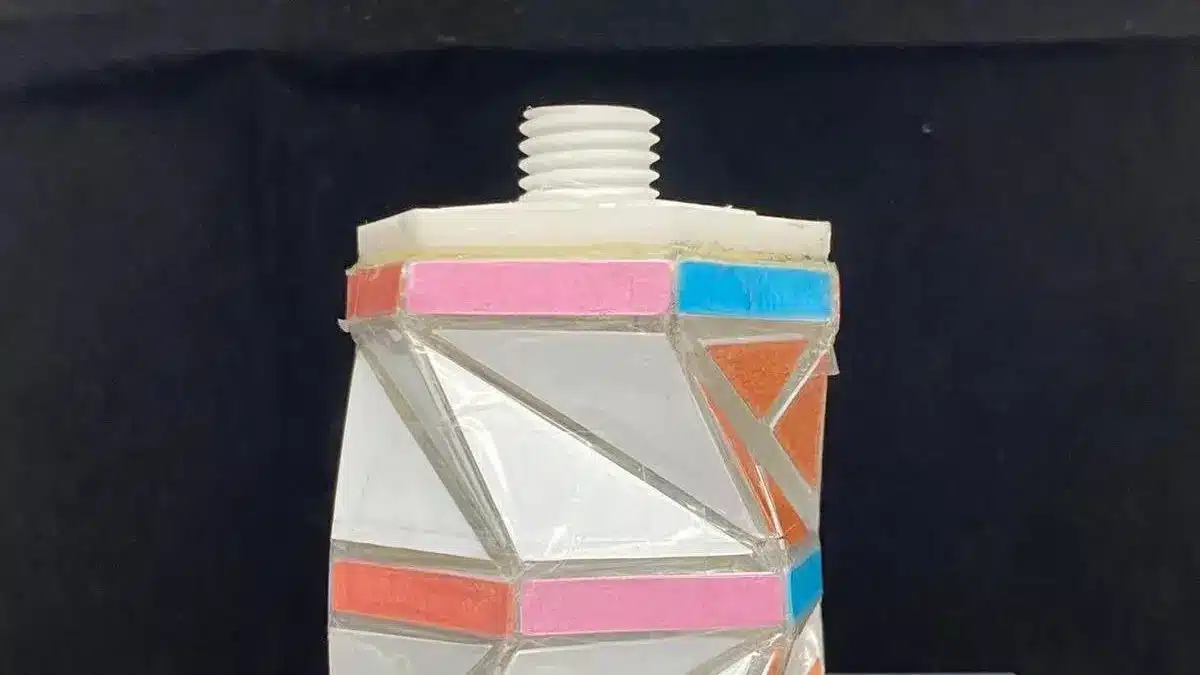
La combinaison du savoir-faire de l’Université de Westlake et de l’Université de Zhejiang a conduit à la création d’un robot modulaire s’inspirant fortement de l’origami. Le motif Kresling, composé d’une alternance de plis montagne et vallée, peut créer des formes complexes rappelant des structures naturelles, telles que les motifs des ailes de papillon de nuit ou les géométries en spirale des pommes de pin.
Le Dr. Hanqing Jiang, membre éminent de l’équipe de recherche, a déclaré : « Il y a eu quelques tentatives pour utiliser le motif Kresling pour développer des bras robotiques multimodes. » Il ajoute que leur objectif principal était de modifier ce motif classique pour explorer de nouveaux modes de déformation.
Le secret réside dans la pression
Le module développé par ces chercheurs utilise la pneumatique, exploitant le gaz ou l’air sous pression pour générer divers mouvements. En fonction de la pression appliquée, le module peut changer de forme et répondre aux besoins d’un éventail de scénarios d’application. En fin de compte, il offre une flexibilité sans précédent, avec sept modes de mouvement différents pour un seul module origami.
Le Dr. Jiang a fait une analogie fascinante : « Le module est comme nos bras, qui peuvent réaliser tous les modes de déformation (contraction/extension, torsion, flexion), selon la façon dont les nerfs contrôlent les muscles. »
Des applications concrètes pour l’avenir
Après avoir été testé dans des simulations et des expérimentations réelles, le module a montré des résultats très prometteurs. Sa capacité à être réassemblé en temps réel offre une adaptabilité précieuse, particulièrement pour des missions nécessitant de rapides ajustements face à des changements environnementaux.
Regardant vers l’avenir, le Dr. Jiang a conclu : « Dans mes prochains travaux, je prévois d’utiliser cette structure pour des applications plus pratiques, telles que la saisie d’objets de grande taille. »
En synthèse
La convergence de l’art traditionnel de l’origami et de la robotique avancée pourrait révolutionner la façon dont nous concevons et utilisons les robots modulaires. La flexibilité et l’adaptabilité offertes par ce design inspiré du motif Kresling ouvrent des perspectives fascinantes pour l’avenir de la robotique.
Pour une meilleure compréhension
Qu’est-ce que le motif Kresling en origami ?
Il s’agit d’une alternance de plis montagne et vallée qui permet de créer des formes complexes.
Comment fonctionne le module robotique basé sur l’origami ?
Il utilise la pneumatique pour changer de forme en fonction de la pression appliquée, offrant une multitude de modes de mouvement.
Quelles sont les applications potentielles de ce module ?
Les robots équipés de ce module pourraient être utilisés dans des missions nécessitant une grande adaptabilité et pourraient être adaptés à des tâches telles que la saisie d’objets de grande taille.
Plus d’informations : Chao Zhang et al, Plug & play origami modules with all-purpose deformation modes, Nature Communications (2023). DOI: 10.1038/s41467-023-39980-7
Credit: Chao Zhang
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.