Dans le domaine de la robotique, une nouvelle approche simplifiée pour la conception et la fabrication de robots marcheurs et rampants à l’échelle du centimètre a été développée.
Inspirée de l’origami, cette méthode a été mise en œuvre par une équipe de chercheurs dirigée par Cynthia Sung, professeure assistante en ingénierie mécanique et mécanique appliquée au Penn Engineering (USA).
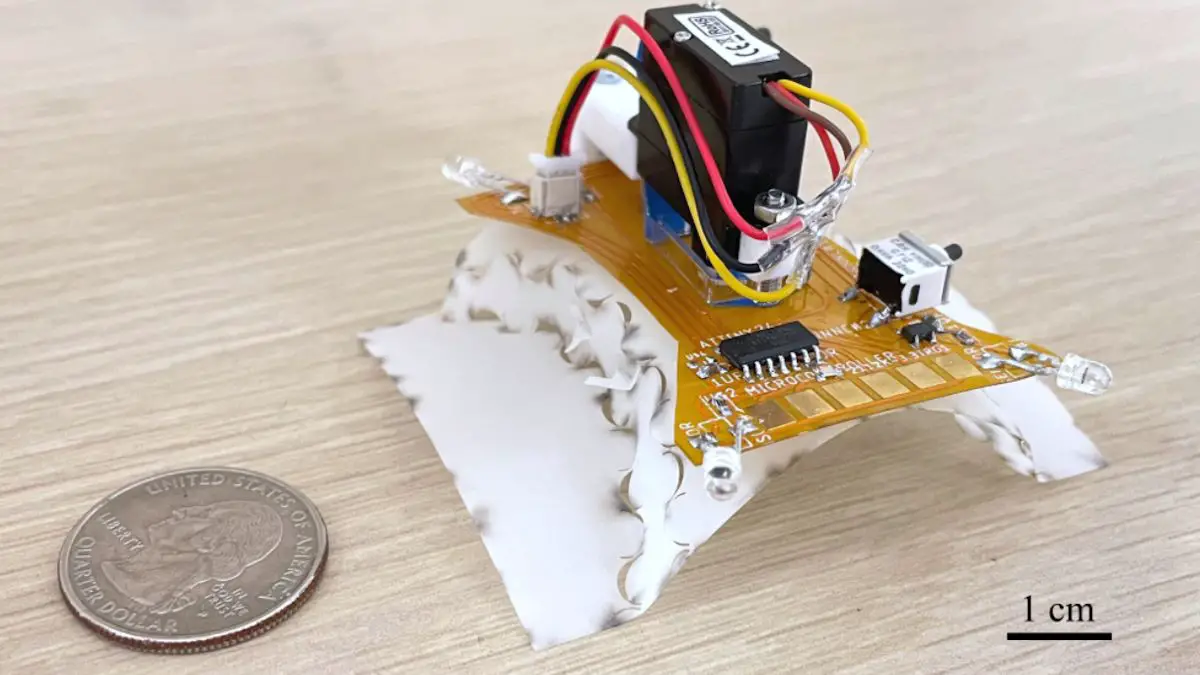
Le robot, nommé CurveQuad, utilise l’origami à plis courbés pour se plier, se déplier, ramper et diriger, le tout avec un seul moteur.
L’origami comme source d’inspiration
Les plis courbés utilisés dans cette technique ont des propriétés mécaniques intéressantes par rapport aux designs à plis droits plus couramment utilisés. En effet, ils induisent une courbure dans une feuille pliée.
L’énergie, stockée dans le pliage des plis et dans la courbure des panneaux, permet des mouvements contrôlés, réversibles et complexes avec moins d’actionneurs.
« Le robot est capable de faire ces choses parce qu’il utilise des plis courbés », explique Cynthia Sung, également membre du laboratoire GRASP du Penn Engineering.
Un robot économique et facile à produire
La simplicité de ce robot et son coût relativement faible laissent envisager des conceptions similaires à l’avenir pour le déploiement rapide de nuées de robots, qui pourraient être produits pour quelques dollars ou potentiellement même quelques centimes par robot.
Le moteur unique de CurveQuad pour le pliage et le mouvement réduit la masse et le volume total du robot. Le design inspiré de l’origami simplifie également la fabrication et l’assemblage d’un robot à l’échelle du centimètre en fabriquant l’ensemble du robot, ou ses parties, à partir de quelques feuilles plates de matériau, puis en le pliant en 3D, souvent avec des électroniques, des actionneurs et des calculs intégrés à bord.
Ces processus de fabrication sont également évolutifs pour une production à grande échelle.
En synthèse
CurveQuad est une nouvelle addition à l’espace de conception peu peuplé des robots marcheurs à actionneur unique et dirigeables. Mesurant seulement huit centimètres de long et pesant environ 11 grammes, il est relativement petit et léger pour un robot marcheur à moteur.
Les chercheurs ont démontré un contrôle de rétroaction de base en dirigeant le robot vers une source de lumière à partir de différentes positions et orientations de départ. L’équipe a ensuite illustré l’agrégation de la nuée à travers quatre robots se dirigeant simultanément vers la lumière.
Les résultats mettent en évidence comment l’origami à plis courbés dans les robots auto-assemblants et déployables soutient des mouvements complexes comme la locomotion.
Les recherches futures examineront comment de petits robots jetables pourraient explorer des environnements encombrés ou dangereux.
Pour une meilleure compréhension
Qu’est-ce que le CurveQuad ?
Le CurveQuad est un robot quadrupède à l’échelle du centimètre qui utilise l’origami à plis courbés pour se plier, se déplier, ramper et diriger, le tout avec un seul moteur.
Qu’est-ce qui rend le CurveQuad unique ?
Ce robot reste unique en raison de son utilisation de l’origami à plis courbés, qui permet des mouvements contrôlés, réversibles et complexes avec moins d’actionneurs. De plus, sa conception simplifiée et son coût relativement faible le rendent idéal pour le déploiement rapide de nuées de robots.
Comment le CurveQuad est-il fabriqué ?
Le CurveQuad est fabriqué à partir de quelques feuilles plates de matériau qui sont ensuite pliées en 3D. Le moteur unique du robot pour le pliage et le mouvement réduit la masse et le volume total du robot.
Quelles sont les applications potentielles du CurveQuad ?
Le robot quadrupède pourrait être utilisé pour explorer des environnements encombrés ou dangereux. De plus, sa conception simplifiée et son coût relativement faible le rendent idéal pour le déploiement rapide de nuées de robots.
Quels sont les futurs développements prévus pour le CurveQuad ?
Les chercheurs travaillent actuellement sur une deuxième version du robot avec des électroniques entièrement intégrées pour démontrer sa capacité à se plier et à se déplier pour l’exploration ou la détection, puis à se replier pour le stockage jusqu’à la prochaine utilisation.
Les résultats de cette recherche ont été publiés dans les actes de la conférence internationale IEEE/RSJ sur les robots intelligents et les systèmes (« CurveQuad : Un quadrupède origami à l’échelle du centimètre qui utilise des plis courbés pour se plier et ramper avec un seul moteur »).
Article : « CurveQuad: A Centimeter-Scale Origami Quadruped that Leverages Curved Creases to Self-Fold and Crawl with One Motor » – ( détail )
Newsletter Enerzine
Recevez les meilleurs articles
Énergie, environnement, innovation, science : l’essentiel directement dans votre boîte mail.