Les muscles, ces merveilles de la nature, sont des actionneurs parfaits capables de transformer l’énergie en mouvement avec une puissance et une précision inégalées pour leur taille. Leur capacité à se régénérer après une blessure et à se renforcer grâce à l’exercice en font des candidats de choix pour les ingénieurs qui cherchent à concevoir des robots plus performants et plus adaptables.
Des robots « biohybrides » prometteurs
Plusieurs équipes de chercheurs ont déjà démontré le potentiel des muscles naturels pour animer des squelettes artificiels capables de marcher, nager, pomper ou encore saisir des objets. Chaque robot ainsi créé présente une conception unique, sans véritable modèle générique permettant toutefois d’exploiter au mieux les capacités des tissus musculaires.
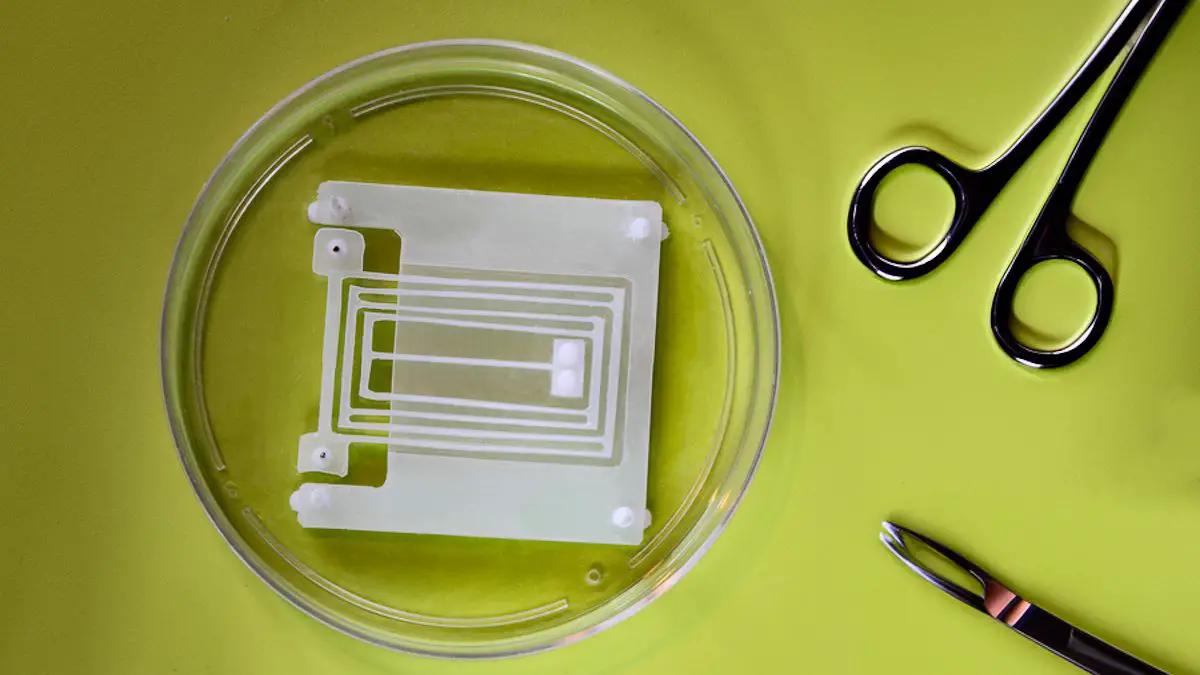
C’est dans ce contexte que les ingénieurs du MIT ont mis au point un dispositif ressemblant à un ressort, qui pourrait servir de module de base pour la plupart des robots à muscles. Baptisé «flexure», ce nouveau composant est conçu pour optimiser le travail fourni par les tissus musculaires qui lui sont attachés, à l’image d’une presse à jambes chargée avec la masse idéale pour maximiser l’amplitude des mouvements naturels du muscle.
Un « squelette » adaptable et performant
Lors des tests, les chercheurs ont fixé un anneau de tissu musculaire autour du dispositif, tel un élastique tendu entre deux poteaux. Résultat : le muscle a étiré le ressort de manière fiable et répétée, avec une amplitude cinq fois supérieure à celle obtenue avec les conceptions précédentes.
Pour Ritu Raman, professeure au MIT et co-auteure de l’étude publiée dans Advanced Intelligent Systems, ce design de flexure constitue un nouveau bloc de construction pouvant être combiné à d’autres pour créer des squelettes artificiels de toutes formes. Il suffira ensuite d’y ajouter des tissus musculaires pour animer ces structures.
Selon la chercheuse, ces flexures offrent aux roboticiens «un nouvel ensemble de règles pour créer des robots puissants et précis, actionnés par des muscles, et capables de réaliser des tâches intéressantes». Une véritable boîte à outils pour concevoir les machines du futur.
Vers des robots chirurgicaux miniatures
L’équipe du MIT adapte et combine désormais ces flexures pour construire des robots articulés, précis et fiables, alimentés par des muscles naturels. Parmi les applications envisagées figurent notamment des robots chirurgicaux miniatures, capables de réaliser des interventions peu invasives à l’intérieur du corps humain.
«Techniquement, les muscles peuvent animer des robots de toutes tailles, mais nous sommes particulièrement enthousiastes à l’idée de créer de petits robots, car c’est dans ce domaine que les actionneurs biologiques excellent en termes de force, d’efficacité et d’adaptabilité», souligne Ritu Raman.
Cette nouvelle approche ouvre ainsi l’accès à une nouvelle génération de robots bio-inspirés, alliant la complexité et la performance des systèmes naturels à la précision et la polyvalence des technologies de pointe. Une alliance prometteuse pour repousser les limites de la robotique et imaginer des machines toujours plus autonomes et interactives.
Légende illustration : Les ingénieurs du MIT ont mis au point un nouveau ressort (présenté dans une boîte de Pétri) qui maximise le travail des muscles naturels. Lorsque des tissus musculaires vivants sont attachés à des poteaux situés aux coins du dispositif, les contractions du muscle tirent sur le ressort, formant ainsi un actionneur naturel efficace. Le ressort peut servir de « squelette » pour de futurs robots musclés. Crédit : Felice Frankel
Article : « “Enhancing and Decoding the Performance of Muscle Actuators with Flexures” » – DOI: 10.1002/aisy.202300834