Des chercheurs italiens ont réalisé le premier vol d’iRonCub3, un robot humanoïde volant à réaction unique en son genre, conçu pour les environnements du monde réel. Le robot a pu se soulever du sol d’environ 50 cm tout en conservant sa stabilité.
L’Institut italien de technologie (IIT) a franchi une étape décisive dans le domaine de la robotique humanoïde en démontrant le premier vol d’iRonCub3, le premier robot humanoïde volant à réaction au monde, spécialement conçu pour fonctionner dans des environnements réels. L’équipe de recherche a étudié l’aérodynamique complexe du corps artificiel et a développé un modèle de contrôle avancé pour les systèmes composés de plusieurs parties interconnectées. L’ensemble des travaux sur iRonCub3, y compris les essais en vol, a duré environ deux ans. Lors des dernières expériences, le robot a pu se soulever du sol d’environ 50 cm tout en conservant sa stabilité. Cette prouesse ouvre la voie à une nouvelle génération de robots volants capables d’évoluer dans des environnements complexes tout en conservant une structure humaine.
Les études sur l’aérodynamique et le contrôle ont été décrites dans un article publié aujourd’hui dans Nature Communications Engineering, une revue en libre accès du portefeuille Nature. Les recherches ont été menées par des roboticiens de l’IIT de Gênes, en Italie, en collaboration avec le groupe d’Alex Zanotti du laboratoire d’aérodynamique DAER de l’École polytechnique de Milan – où une série complète d’essais en soufflerie a été réalisée – et le groupe de Gianluca Iaccarino de l’université de Stanford – où des algorithmes d’apprentissage en profondeur ont été utilisés pour identifier les modèles aérodynamiques.
La démonstration de vol du robot représente la dernière étape du laboratoire d’intelligence artificielle et mécanique (AMI) de l’IIT de Gênes, dirigé par Daniele Pucci. Leurs recherches visent à repousser les limites de la robotique humanoïde multimodale, en combinant la locomotion terrestre et la mobilité aérienne pour développer des robots capables d’opérer dans des environnements non structurés et extrêmes.
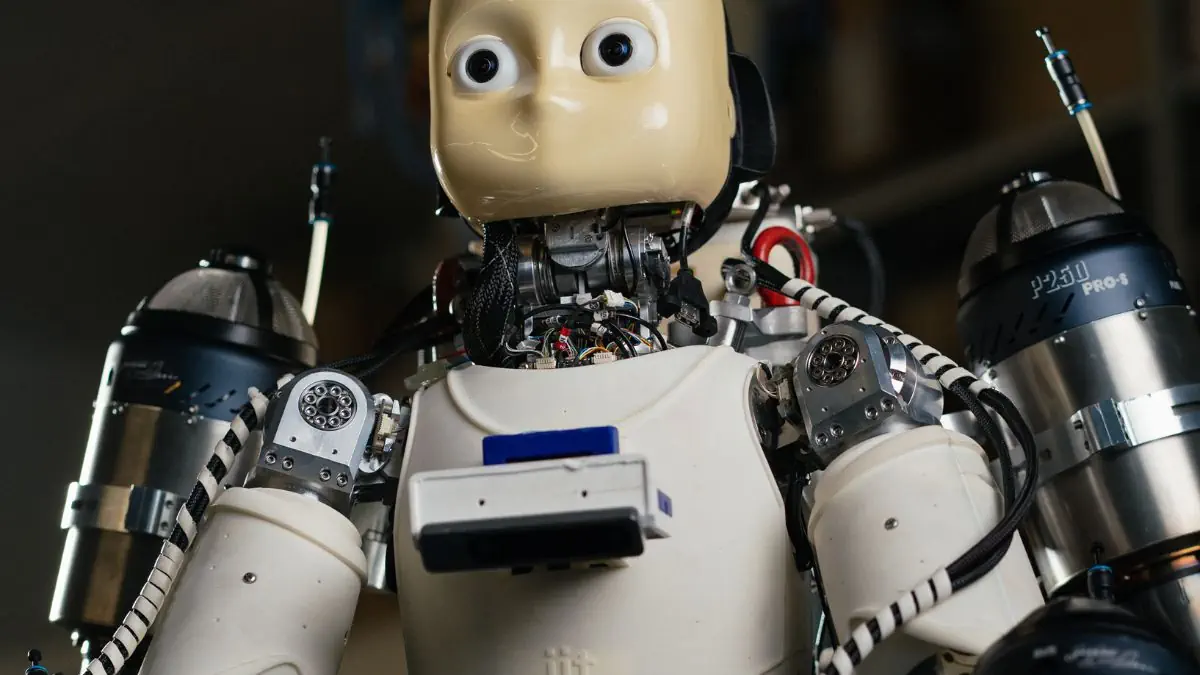
iRonCub3 est l’évolution technologique des prototypes précédents et est basé sur la dernière génération du robot humanoïde iCub (iCub3), développé pour être téléopéré. Il intègre quatre moteurs à réaction, deux montés sur les bras et deux sur un jetpack attaché au dos du robot. Des modifications de la conception matérielle de l’iCub ont été nécessaires pour supporter les moteurs externes, comme le développement d’une nouvelle colonne vertébrale en titane et l’ajout de couvertures résistantes à la chaleur pour la protection. Le robot combiné aux moteurs à réaction pèse environ 70 kg, tandis que les turbines peuvent fournir une force de poussée maximale de plus de 1000 N. Cette configuration permet au robot de rester en vol stationnaire et d’effectuer des manœuvres de vol contrôlées, même en présence de perturbations du vent ou d’incertitudes environnementales. La température d’échappement peut atteindre 800 degrés.
« Cette recherche est radicalement différente de la robotique humanoïde traditionnelle et nous a obligés à faire un bond en avant considérable par rapport à l’état de l’art », précise Daniele Pucci. « Ici, la thermodynamique joue un rôle essentiel : les gaz d’émission des turbines atteignent une température de 700 °C et s’écoulent à une vitesse proche de celle du son. L’aérodynamique doit être évaluée en temps réel, tandis que les systèmes de contrôle doivent gérer à la fois des actionneurs d’articulation lents et des turbines à réaction rapides. Tester ces robots est aussi fascinant que dangereux et il n’y a pas de place pour l’improvisation ».
L’équipe de recherche de l’AMI s’est concentrée sur l’équilibre dynamique de la plateforme, rendu particulièrement complexe par la morphologie humanoïde du robot. Contrairement aux drones conventionnels, qui ont des structures symétriques et compactes, iRonCub3 a une forme allongée, avec des masses réparties sur des membres mobiles et un centre de masse variable. Cela a nécessité le développement de modèles d’équilibre de vol avancés qui tiennent compte de la dynamique multicorps du robot et de l’interaction entre la propulsion par jet et les mouvements des membres. En outre, les membres mobiles compliquent considérablement l’aérodynamique, qui change à chaque mouvement de l’un des membres du robot.
Les chercheurs de l’IIT ont réalisé de nombreuses expériences en soufflerie, des simulations avancées de dynamique des fluides numérique (CFD) et développé des modèles basés sur l’IA capables d’estimer les forces aérodynamiques en temps réel.
« Nos modèles comprennent des réseaux neuronaux entraînés sur des données simulées et expérimentales et sont intégrés dans l’architecture de contrôle du robot pour garantir un vol stable », explique Antonello Paolino, premier auteur de l’article et doctorant dans un programme commun entre l’IIT et l’université de Naples, qui a passé un semestre en tant que chercheur invité à l’université de Stanford.
Par conséquent, iRonCub3 est équipé de systèmes de contrôle alimentés par l’IA qui lui permettent de voler tout en gérant des flux d’air turbulents à grande vitesse, des températures extrêmes et la dynamique complexe des systèmes multi-corps.
La modélisation aérodynamique avancée développée par l’IIT démontre qu’il est possible de maintenir la posture et la stabilité même lors de manœuvres non stationnaires, telles que l’allumage séquentiel du moteur ou les changements de géométrie du corps.
Ces études peuvent être transférées à d’autres robots aux morphologies non conventionnelles, ce qui représente un cas unique par rapport aux drones classiques, dont l’équilibre repose sur la symétrie et des stratégies de contrôle simplifiées qui négligent souvent l’aérodynamique et la thermodynamique propres au robot.
La conception finale d’iRonCub3 est le résultat d’un processus de co-conception avancé, spécifiquement développé pour intégrer l’intelligence artificielle et la multi-physique dans la conception de robots volants. Ces techniques, qui sont innovantes dans le domaine de la robotique, permettent d’optimiser simultanément la forme du corps et les stratégies de contrôle, en tenant compte des interactions complexes entre l’aérodynamique, la thermodynamique et la dynamique multicorps.
La co-conception a été utilisée pour déterminer l’emplacement optimal des turbines à réaction afin de maximiser le contrôle et la stabilité pendant le vol. Des techniques de conception avancées ont également été employées pour gérer la dissipation de la chaleur générée par les moteurs, garantissant ainsi l’intégrité structurelle du robot même dans des conditions de fonctionnement extrêmes.
Le robot a été entièrement repensé pour résister aux conditions difficiles associées à la locomotion aérienne, en introduisant des améliorations majeures axées sur la précision de l’actionnement, un meilleur contrôle de la poussée grâce à des capteurs intégrés, et des planificateurs avancés pour un décollage et un atterrissage coordonnés.
Tout au long du processus de conception, de nombreux ajustements itératifs ont été effectués sur la base des résultats de simulations avancées et de tests expérimentaux, pour aboutir à la configuration actuelle du robot. Cette approche a permis à l’équipe de surmonter les limites des méthodologies traditionnelles et représente un pas en avant dans la conception automatique et intégrée de systèmes robotiques complexes.
Les premiers essais en vol d’iRonCub3 ont été effectués dans la petite zone d’essais en vol de l’IIT, où le robot a pu se soulever du sol d’environ 50 cm. Dans les mois à venir, les essais de prototypes se poursuivront et seront encore améliorés grâce à une collaboration avec l’aéroport de Gênes (Aeroporto di Genova), qui mettra à disposition une zone dédiée qui sera aménagée et équipée par l’Institut italien de technologie dans le respect de toutes les règles de sécurité requises. Cette zone accueillera les futures campagnes expérimentales.
Les applications des robots humanoïdes volants comme iRonCub3 sont envisagées dans une variété de scénarios futurs, tels que les opérations de recherche et de sauvetage dans les zones sinistrées, l’inspection des environnements dangereux ou inaccessibles, et les missions d’exploration où les capacités de manipulation et la mobilité aérienne sont essentielles.
“iRonCub 3: The Jet-Powered Flying Humanoid Robot” arxiv.org/abs/2506.01125